#include <smartereye_component.h>
|
| void | run () |
| |
| bool | SetCallback () |
| |
| bool | Callback (RawImageFrame *rawFrame) |
| |
| void | processFrame (int frameId, char *image, char *extended, int64_t time, int width, int height) |
| |
| void | processFrame (int frameId, char *image, uint32_t dataSize, int width, int height, int frameFormat) |
| |
| virtual void | Clear () |
| |
| const std::string & | ConfigFilePath () const |
| |
| void | LoadConfigFiles (const ComponentConfig &config) |
| |
| void | LoadConfigFiles (const TimerComponentConfig &config) |
| |
◆ ~SmartereyeComponent()
| apollo::drivers::smartereye::SmartereyeComponent::~SmartereyeComponent |
( |
| ) |
|
◆ Callback()
| bool apollo::drivers::smartereye::SmartereyeComponent::Callback |
( |
RawImageFrame * |
rawFrame | ) |
|
|
protected |
◆ Init()
| bool apollo::drivers::smartereye::SmartereyeComponent::Init |
( |
| ) |
|
|
overridevirtual |
◆ processFrame() [1/2]
| void apollo::drivers::smartereye::SmartereyeComponent::processFrame |
( |
int |
frameId, |
|
|
char * |
image, |
|
|
char * |
extended, |
|
|
int64_t |
time, |
|
|
int |
width, |
|
|
int |
height |
|
) |
| |
|
protected |
◆ processFrame() [2/2]
| void apollo::drivers::smartereye::SmartereyeComponent::processFrame |
( |
int |
frameId, |
|
|
char * |
image, |
|
|
uint32_t |
dataSize, |
|
|
int |
width, |
|
|
int |
height, |
|
|
int |
frameFormat |
|
) |
| |
|
protected |
◆ run()
| void apollo::drivers::smartereye::SmartereyeComponent::run |
( |
| ) |
|
|
protected |
◆ SetCallback()
| bool apollo::drivers::smartereye::SmartereyeComponent::SetCallback |
( |
| ) |
|
|
protected |
The documentation for this class was generated from the following file:

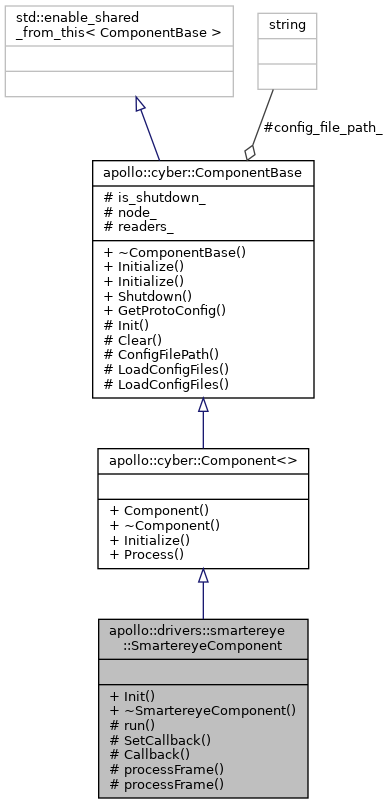
 Public Member Functions inherited from apollo::cyber::Component< M0, M1, M2, M3 >
Public Member Functions inherited from apollo::cyber::Component< M0, M1, M2, M3 >