#include <component_base.h>
◆ Reader
◆ ~ComponentBase()
| virtual apollo::cyber::ComponentBase::~ComponentBase |
( |
| ) |
|
|
inlinevirtual |
◆ Clear()
| virtual void apollo::cyber::ComponentBase::Clear |
( |
| ) |
|
|
inlineprotectedvirtual |
◆ ConfigFilePath()
| const std::string& apollo::cyber::ComponentBase::ConfigFilePath |
( |
| ) |
const |
|
inlineprotected |
◆ GetProtoConfig()
template<typename T >
| bool apollo::cyber::ComponentBase::GetProtoConfig |
( |
T * |
config | ) |
const |
|
inline |
◆ Init()
| virtual bool apollo::cyber::ComponentBase::Init |
( |
| ) |
|
|
protectedpure virtual |
Implemented in apollo::drivers::SensorCanbus< SensorType >, apollo::drivers::racobit_radar::RacobitRadarCanbusComponent, apollo::perception::onboard::LaneDetectionComponent, apollo::perception::onboard::CameraObstacleDetectionComponent, apollo::perception::onboard::FusionCameraDetectionComponent, apollo::control::MPCControllerSubmodule, apollo::control::LatLonControllerSubmodule, apollo::control::PreprocessorSubmodule, apollo::drivers::conti_radar::ContiRadarCanbusComponent, apollo::prediction::PredictionComponent, apollo::control::ControlComponent, apollo::localization::msf::OnlineVisualizerComponent, apollo::perception::onboard::RadarDetectionComponent, apollo::prediction::PredictorSubmodule, apollo::perception::onboard::TrafficLightsPerceptionComponent, apollo::bridge::UDPBridgeReceiverComponent< T >, apollo::bridge::UDPBridgeSenderComponent< T >, apollo::control::PostprocessorSubmodule, apollo::prediction::EvaluatorSubmodule, apollo::planning::PlanningComponent, apollo::bridge::UDPBridgeMultiReceiverComponent, apollo::drivers::velodyne::PriSecFusionComponent, apollo::drivers::smartereye::SmartereyeComponent, apollo::perception::camera::MotionService, apollo::v2x::ft::V2XFusionComponent, apollo::drivers::microphone::MicrophoneComponent, apollo::localization::MSFLocalizationComponent, apollo::drivers::video::CompCameraH265Compressed, apollo::localization::ndt::NDTLocalizationComponent, apollo::audio::AudioComponent, apollo::drivers::velodyne::VelodyneConvertComponent, apollo::guardian::GuardianComponent, apollo::localization::RTKLocalizationComponent, apollo::drivers::camera::CameraComponent, apollo::drivers::velodyne::VelodyneDriverComponent, apollo::third_party_perception::ThirdPartyPerceptionComponent, apollo::drivers::gnss::GnssDriverComponent, apollo::drivers::velodyne::CompensatorComponent, apollo::perception::onboard::DetectionComponent, apollo::drivers::camera::CompressComponent, apollo::drivers::smartereye::CompressComponent, apollo::perception::onboard::FusionComponent, apollo::perception::onboard::RecognitionComponent, apollo::task_manager::TaskManagerComponent, apollo::storytelling::Storytelling, apollo::transform::StaticTransformComponent, apollo::drivers::hesai::HesaiComponent, apollo::drivers::hesai::HesaiConvertComponent, apollo::drivers::ultrasonic_radar::UltrasonicRadarCanbusComponent, apollo::monitor::Monitor, apollo::drivers::lidar::LidarDriverComponent, apollo::drivers::robosense::RobosenseComponent, apollo::routing::RoutingComponent, apollo::relative_map::RelativeMapComponent, apollo::perception::onboard::LidarOutputComponent, TimerComponentSample, apollo::image_decompress::ImageDecompressComponent, and CommonComponentSample.
◆ Initialize() [1/2]
| virtual bool apollo::cyber::ComponentBase::Initialize |
( |
const ComponentConfig & |
config | ) |
|
|
inlinevirtual |
Reimplemented in apollo::cyber::Component< M0, M1, M2, NullType >, apollo::cyber::Component< M0, M1, NullType, NullType >, apollo::cyber::Component< M0, NullType, NullType, NullType >, apollo::cyber::Component< NullType, NullType, NullType, NullType >, apollo::cyber::Component< M0, M1, M2, M3 >, apollo::cyber::Component< ControlCommand >, apollo::cyber::Component< LocalView >, apollo::cyber::Component< LidarFrameMessage >, apollo::cyber::Component< SubmoduleOutput >, apollo::cyber::Component< drivers::PointCloud >, apollo::cyber::Component<>, apollo::cyber::Component< ContiRadar >, apollo::cyber::Component< VelodyneScan >, apollo::cyber::Component< PointCloud >, apollo::cyber::Component< T >, apollo::cyber::Component< Driver, Driver >, apollo::cyber::Component< Image >, apollo::cyber::Component< apollo::perception::PerceptionObstacles, ADCTrajectoryContainer, SubmoduleOutput >, apollo::cyber::Component< RoutingRequest >, apollo::cyber::Component< prediction::PredictionObstacles, canbus::Chassis, localization::LocalizationEstimate >, apollo::cyber::Component< apollo::drivers::microphone::config::AudioData >, apollo::cyber::Component< PerceptionObstacles >, apollo::cyber::Component< localization::Gps >, apollo::cyber::Component< drivers::gnss::Imu >, apollo::cyber::Component< perception::PerceptionObstacles >, apollo::cyber::Component< apollo::drivers::CompressedImage >, apollo::cyber::Component< task_manager::Task >, apollo::cyber::Component< SensorFrameMessage >, apollo::cyber::Component< HesaiScan >, and apollo::cyber::Component< Preprocessor >.
◆ Initialize() [2/2]
| virtual bool apollo::cyber::ComponentBase::Initialize |
( |
const TimerComponentConfig & |
config | ) |
|
|
inlinevirtual |
◆ LoadConfigFiles() [1/2]
| void apollo::cyber::ComponentBase::LoadConfigFiles |
( |
const ComponentConfig & |
config | ) |
|
|
inlineprotected |
◆ LoadConfigFiles() [2/2]
| void apollo::cyber::ComponentBase::LoadConfigFiles |
( |
const TimerComponentConfig & |
config | ) |
|
|
inlineprotected |
◆ Shutdown()
| virtual void apollo::cyber::ComponentBase::Shutdown |
( |
| ) |
|
|
inlinevirtual |
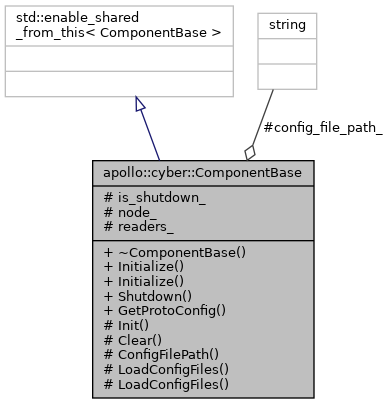
◆ config_file_path_
| std::string apollo::cyber::ComponentBase::config_file_path_ = "" |
|
protected |
◆ is_shutdown_
| std::atomic<bool> apollo::cyber::ComponentBase::is_shutdown_ = {false} |
|
protected |
◆ node_
| std::shared_ptr<Node> apollo::cyber::ComponentBase::node_ = nullptr |
|
protected |
◆ readers_
| std::vector<std::shared_ptr<ReaderBase> > apollo::cyber::ComponentBase::readers_ |
|
protected |
The documentation for this class was generated from the following file: