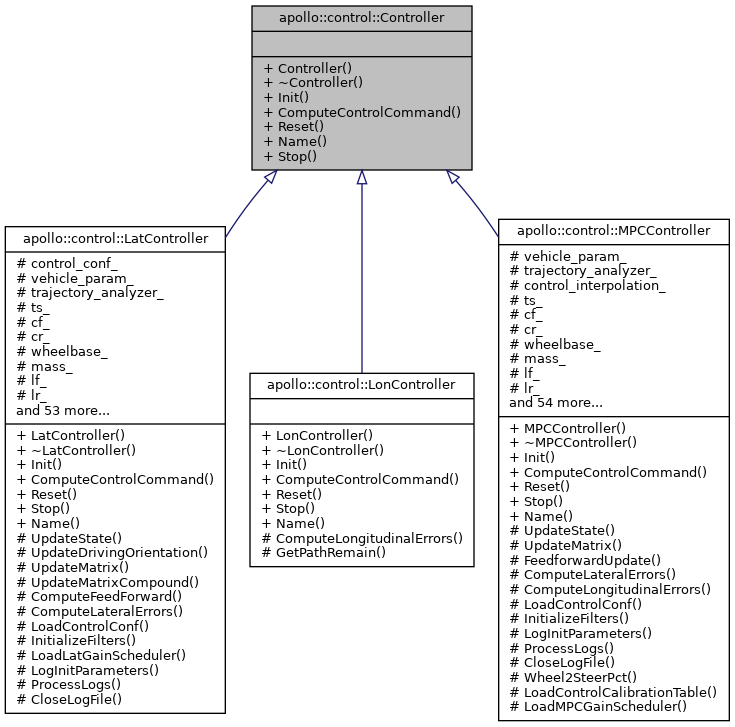
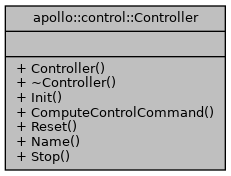
base class for all controllers. More...
#include <controller.h>
Public Member Functions | |
| Controller ()=default | |
| constructor More... | |
| virtual | ~Controller ()=default |
| destructor More... | |
| virtual common::Status | Init (std::shared_ptr< DependencyInjector > injector, const ControlConf *control_conf)=0 |
| initialize Controller More... | |
| virtual common::Status | ComputeControlCommand (const localization::LocalizationEstimate *localization, const canbus::Chassis *chassis, const planning::ADCTrajectory *trajectory, control::ControlCommand *cmd)=0 |
| compute control command based on current vehicle status and target trajectory More... | |
| virtual common::Status | Reset ()=0 |
| reset Controller More... | |
| virtual std::string | Name () const =0 |
| controller name More... | |
| virtual void | Stop ()=0 |
| stop controller More... | |
Detailed Description
base class for all controllers.
Constructor & Destructor Documentation
◆ Controller()
|
default |
constructor
◆ ~Controller()
|
virtualdefault |
destructor
Member Function Documentation
◆ ComputeControlCommand()
|
pure virtual |
compute control command based on current vehicle status and target trajectory
- Parameters
-
localization vehicle location chassis vehicle status e.g., speed, acceleration trajectory trajectory generated by planning cmd control command
- Returns
- Status computation status
Implemented in apollo::control::LonController.
◆ Init()
|
pure virtual |
initialize Controller
- Parameters
-
control_conf control configurations
- Returns
- Status initialization status
Implemented in apollo::control::LatController, apollo::control::MPCController, and apollo::control::LonController.
◆ Name()
|
pure virtual |
controller name
- Returns
- string controller name in string
Implemented in apollo::control::LatController, apollo::control::MPCController, and apollo::control::LonController.
◆ Reset()
|
pure virtual |
reset Controller
- Returns
- Status reset status
Implemented in apollo::control::LatController, apollo::control::MPCController, and apollo::control::LonController.
◆ Stop()
|
pure virtual |
stop controller
Implemented in apollo::control::LatController, apollo::control::MPCController, and apollo::control::LonController.
The documentation for this class was generated from the following file:
- modules/control/controller/controller.h
