#include <common_component_example.h>
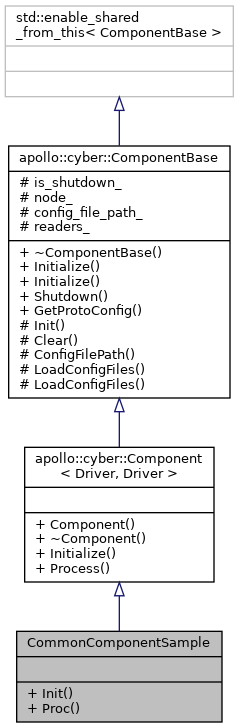
Inheritance diagram for CommonComponentSample:
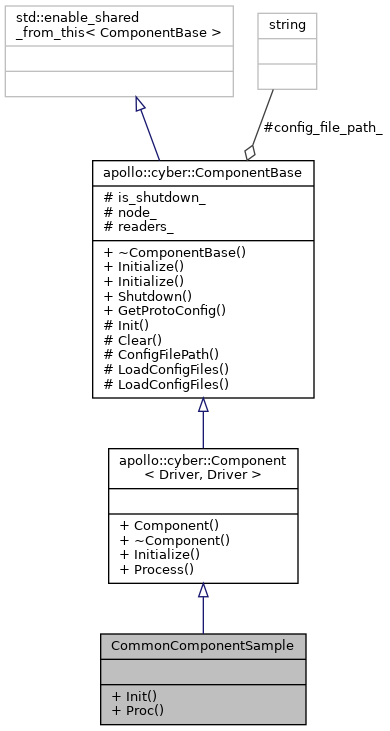
Collaboration diagram for CommonComponentSample:
Public Member Functions | |
| bool | Init () override |
| bool | Proc (const std::shared_ptr< Driver > &msg0, const std::shared_ptr< Driver > &msg1) override |
 Public Member Functions inherited from apollo::cyber::Component< Driver, Driver > Public Member Functions inherited from apollo::cyber::Component< Driver, Driver > | |
| Component () | |
| ~Component () override | |
| bool | Initialize (const ComponentConfig &config) override |
| init the component by protobuf object. More... | |
| bool | Process (const std::shared_ptr< Driver > &msg0, const std::shared_ptr< Driver > &msg1, const std::shared_ptr< NullType > &msg2, const std::shared_ptr< NullType > &msg3) |
| Public Member Functions inherited from apollo::cyber::ComponentBase | |
| virtual | ~ComponentBase () |
| virtual bool | Initialize (const TimerComponentConfig &config) |
| virtual void | Shutdown () |
| template<typename T > | |
| bool | GetProtoConfig (T *config) const |
Additional Inherited Members | |
| Public Types inherited from apollo::cyber::ComponentBase | |
| template<typename M > | |
| using | Reader = cyber::Reader< M > |
| Protected Member Functions inherited from apollo::cyber::ComponentBase | |
| virtual void | Clear () |
| const std::string & | ConfigFilePath () const |
| void | LoadConfigFiles (const ComponentConfig &config) |
| void | LoadConfigFiles (const TimerComponentConfig &config) |
| Protected Attributes inherited from apollo::cyber::ComponentBase | |
| std::atomic< bool > | is_shutdown_ = {false} |
| std::shared_ptr< Node > | node_ = nullptr |
| std::string | config_file_path_ = "" |
| std::vector< std::shared_ptr< ReaderBase > > | readers_ |
Member Function Documentation
◆ Init()
|
overridevirtual |
Implements apollo::cyber::ComponentBase.
◆ Proc()
|
override |
The documentation for this class was generated from the following file:
- cyber/examples/common_component_example/common_component_example.h
