#include <curve1d.h>
◆ Curve1d()
| apollo::planning::Curve1d::Curve1d |
( |
| ) |
|
|
default |
◆ ~Curve1d()
| virtual apollo::planning::Curve1d::~Curve1d |
( |
| ) |
|
|
virtualdefault |
◆ Evaluate()
| virtual double apollo::planning::Curve1d::Evaluate |
( |
const std::uint32_t |
order, |
|
|
const double |
param |
|
) |
| const |
|
pure virtual |
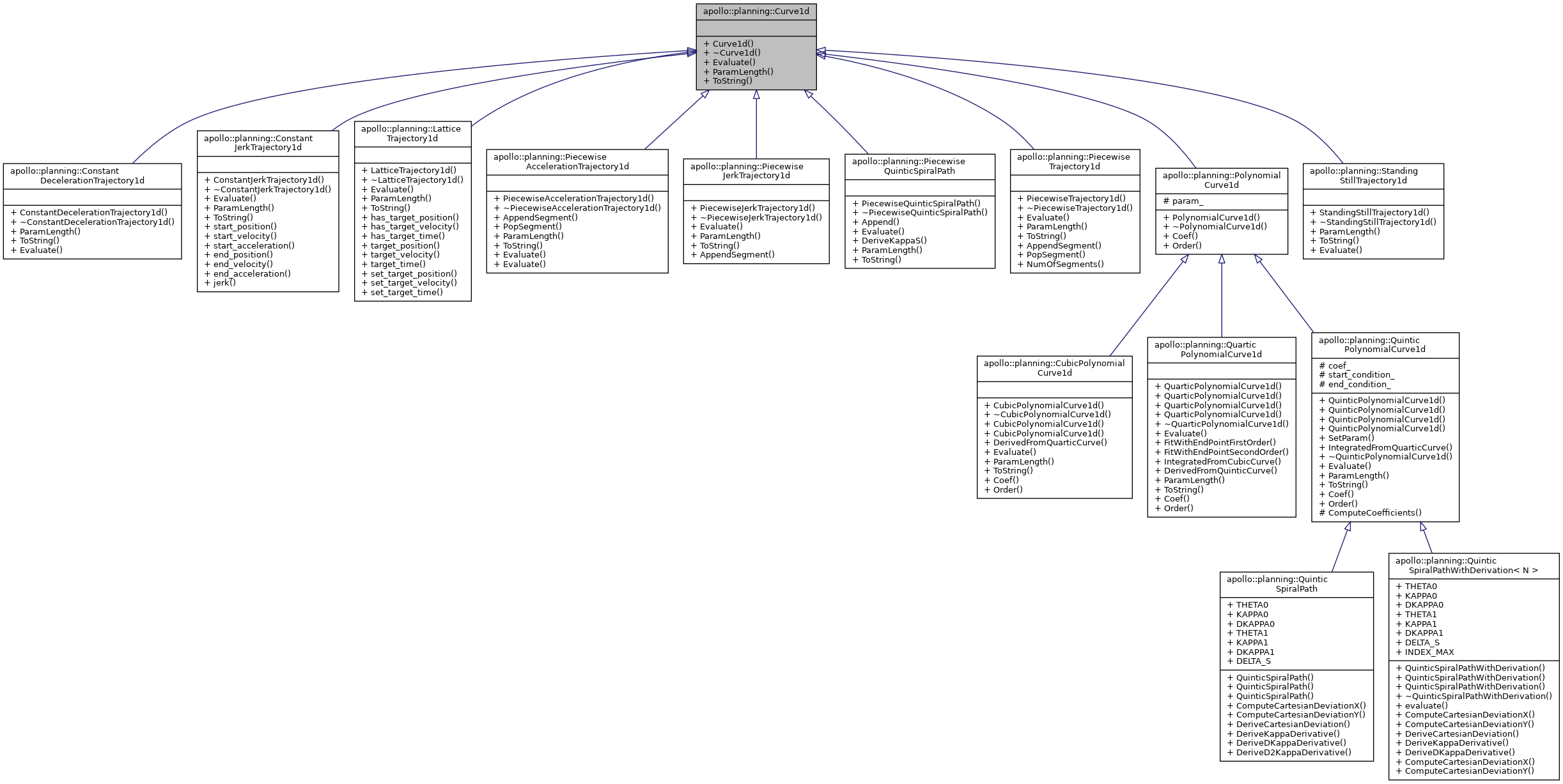
Implemented in apollo::planning::QuinticPolynomialCurve1d, apollo::planning::CubicPolynomialCurve1d, apollo::planning::QuarticPolynomialCurve1d, apollo::planning::PiecewiseAccelerationTrajectory1d, apollo::planning::ConstantDecelerationTrajectory1d, apollo::planning::PiecewiseQuinticSpiralPath, apollo::planning::StandingStillTrajectory1d, apollo::planning::PiecewiseJerkTrajectory1d, apollo::planning::PiecewiseTrajectory1d, apollo::planning::ConstantJerkTrajectory1d, and apollo::planning::LatticeTrajectory1d.
◆ ParamLength()
| virtual double apollo::planning::Curve1d::ParamLength |
( |
| ) |
const |
|
pure virtual |
Implemented in apollo::planning::QuarticPolynomialCurve1d, apollo::planning::QuinticPolynomialCurve1d, apollo::planning::CubicPolynomialCurve1d, apollo::planning::PiecewiseQuinticSpiralPath, apollo::planning::PiecewiseAccelerationTrajectory1d, apollo::planning::PiecewiseJerkTrajectory1d, apollo::planning::PiecewiseTrajectory1d, apollo::planning::ConstantJerkTrajectory1d, apollo::planning::LatticeTrajectory1d, apollo::planning::ConstantDecelerationTrajectory1d, and apollo::planning::StandingStillTrajectory1d.
◆ ToString()
| virtual std::string apollo::planning::Curve1d::ToString |
( |
| ) |
const |
|
pure virtual |
Implemented in apollo::planning::QuarticPolynomialCurve1d, apollo::planning::QuinticPolynomialCurve1d, apollo::planning::CubicPolynomialCurve1d, apollo::planning::PiecewiseQuinticSpiralPath, apollo::planning::PiecewiseAccelerationTrajectory1d, apollo::planning::PiecewiseJerkTrajectory1d, apollo::planning::PiecewiseTrajectory1d, apollo::planning::ConstantJerkTrajectory1d, apollo::planning::LatticeTrajectory1d, apollo::planning::ConstantDecelerationTrajectory1d, and apollo::planning::StandingStillTrajectory1d.
The documentation for this class was generated from the following file: