#include <mlf_engine.h>
◆ MlfEngine()
| apollo::perception::lidar::MlfEngine::MlfEngine |
( |
| ) |
|
|
default |
◆ ~MlfEngine()
| virtual apollo::perception::lidar::MlfEngine::~MlfEngine |
( |
| ) |
|
|
virtualdefault |
◆ CollectTrackedResult()
| void apollo::perception::lidar::MlfEngine::CollectTrackedResult |
( |
LidarFrame * |
frame | ) |
|
|
protected |
◆ Init()
◆ Name()
| std::string apollo::perception::lidar::MlfEngine::Name |
( |
| ) |
const |
|
inlineoverridevirtual |
◆ RemoveStaleTrackData()
| void apollo::perception::lidar::MlfEngine::RemoveStaleTrackData |
( |
const std::string & |
name, |
|
|
double |
timestamp, |
|
|
std::vector< MlfTrackDataPtr > * |
tracks |
|
) |
| |
|
protected |
◆ SplitAndTransformToTrackedObjects()
| void apollo::perception::lidar::MlfEngine::SplitAndTransformToTrackedObjects |
( |
const std::vector< base::ObjectPtr > & |
objects, |
|
|
const base::SensorInfo & |
sensor_info |
|
) |
| |
|
protected |
◆ Track()
◆ TrackObjectMatchAndAssign()
◆ TrackStateFilter()
| void apollo::perception::lidar::MlfEngine::TrackStateFilter |
( |
const std::vector< MlfTrackDataPtr > & |
tracks, |
|
|
double |
frame_timestamp |
|
) |
| |
|
protected |
◆ background_objects_
| std::vector<TrackedObjectPtr> apollo::perception::lidar::MlfEngine::background_objects_ |
|
protected |
◆ background_track_data_
| std::vector<MlfTrackDataPtr> apollo::perception::lidar::MlfEngine::background_track_data_ |
|
protected |
◆ foreground_objects_
| std::vector<TrackedObjectPtr> apollo::perception::lidar::MlfEngine::foreground_objects_ |
|
protected |
◆ foreground_track_data_
| std::vector<MlfTrackDataPtr> apollo::perception::lidar::MlfEngine::foreground_track_data_ |
|
protected |
◆ global_to_local_offset_
| Eigen::Vector3d apollo::perception::lidar::MlfEngine::global_to_local_offset_ |
|
protected |
◆ histogram_bin_size_
| size_t apollo::perception::lidar::MlfEngine::histogram_bin_size_ = 10 |
|
protected |
◆ main_sensor_
| std::set<std::string> apollo::perception::lidar::MlfEngine::main_sensor_ |
|
protected |
◆ matcher_
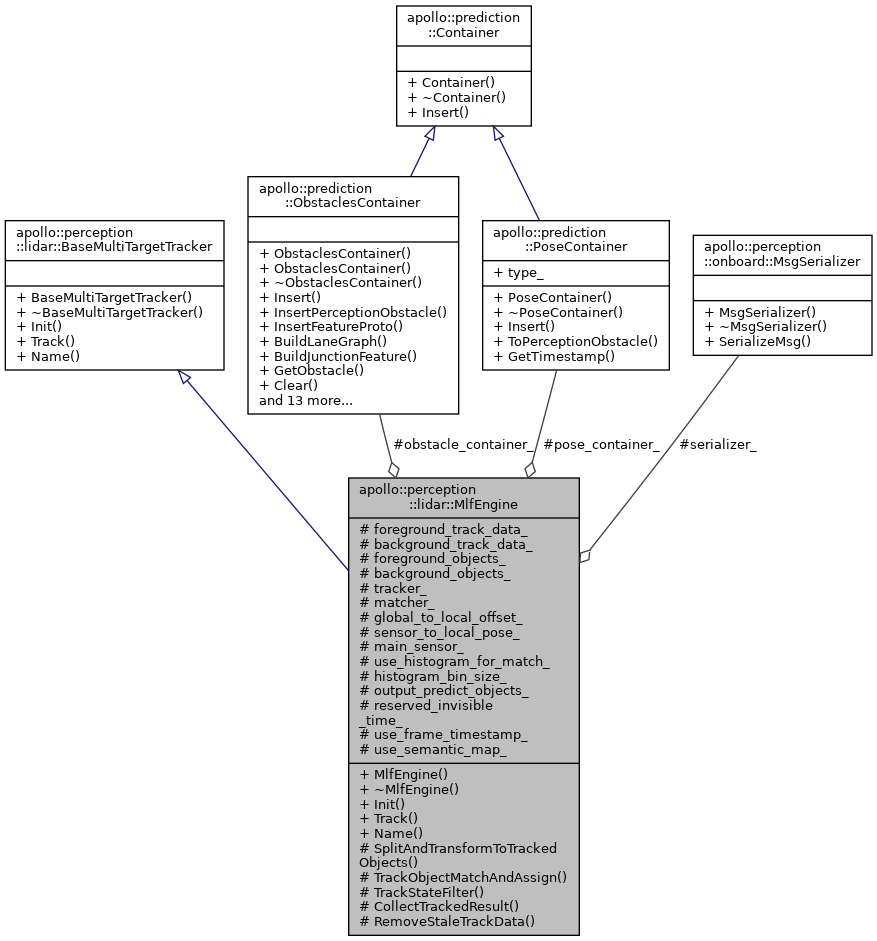
◆ obstacle_container_
◆ output_predict_objects_
| bool apollo::perception::lidar::MlfEngine::output_predict_objects_ = false |
|
protected |
◆ pose_container_
◆ reserved_invisible_time_
| double apollo::perception::lidar::MlfEngine::reserved_invisible_time_ = 0.3 |
|
protected |
◆ sensor_to_local_pose_
| Eigen::Affine3d apollo::perception::lidar::MlfEngine::sensor_to_local_pose_ |
|
protected |
◆ serializer_
◆ tracker_
| std::unique_ptr<MlfTracker> apollo::perception::lidar::MlfEngine::tracker_ |
|
protected |
◆ use_frame_timestamp_
| bool apollo::perception::lidar::MlfEngine::use_frame_timestamp_ = false |
|
protected |
◆ use_histogram_for_match_
| bool apollo::perception::lidar::MlfEngine::use_histogram_for_match_ = true |
|
protected |
◆ use_semantic_map_
| bool apollo::perception::lidar::MlfEngine::use_semantic_map_ = false |
|
protected |
The documentation for this class was generated from the following file:
- modules/perception/lidar/lib/tracker/multi_lidar_fusion/mlf_engine.h
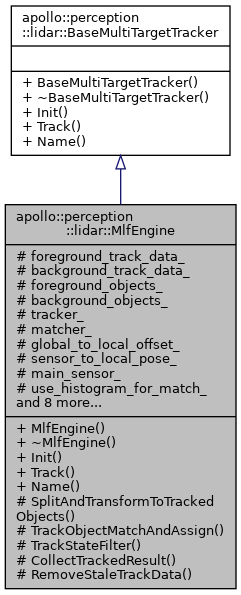
 Public Member Functions inherited from apollo::perception::lidar::BaseMultiTargetTracker
Public Member Functions inherited from apollo::perception::lidar::BaseMultiTargetTracker