#include <mlf_track_object_matcher.h>
◆ MlfTrackObjectMatcher()
| apollo::perception::lidar::MlfTrackObjectMatcher::MlfTrackObjectMatcher |
( |
| ) |
|
|
default |
◆ ~MlfTrackObjectMatcher()
| apollo::perception::lidar::MlfTrackObjectMatcher::~MlfTrackObjectMatcher |
( |
| ) |
|
|
default |
◆ ComputeAssociateMatrix()
◆ Init()
◆ Match()
| void apollo::perception::lidar::MlfTrackObjectMatcher::Match |
( |
const MlfTrackObjectMatcherOptions & |
options, |
|
|
const std::vector< TrackedObjectPtr > & |
objects, |
|
|
const std::vector< MlfTrackDataPtr > & |
tracks, |
|
|
std::vector< std::pair< size_t, size_t >> * |
assignments, |
|
|
std::vector< size_t > * |
unassigned_tracks, |
|
|
std::vector< size_t > * |
unassigned_objects |
|
) |
| |
◆ Name()
| std::string apollo::perception::lidar::MlfTrackObjectMatcher::Name |
( |
| ) |
const |
|
inline |
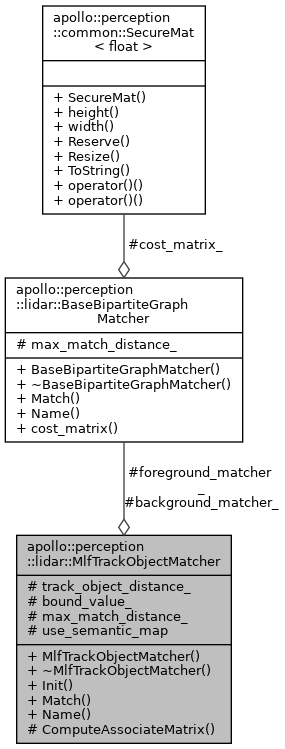
◆ background_matcher_
◆ bound_value_
| float apollo::perception::lidar::MlfTrackObjectMatcher::bound_value_ = 100.f |
|
protected |
◆ foreground_matcher_
◆ max_match_distance_
| float apollo::perception::lidar::MlfTrackObjectMatcher::max_match_distance_ = 4.0f |
|
protected |
◆ track_object_distance_
| std::unique_ptr<MlfTrackObjectDistance> apollo::perception::lidar::MlfTrackObjectMatcher::track_object_distance_ |
|
protected |
◆ use_semantic_map
| bool apollo::perception::lidar::MlfTrackObjectMatcher::use_semantic_map = false |
|
protected |
The documentation for this class was generated from the following file: