#include <scenario.h>
|
| static bool | LoadConfig (const std::string &config_file, ScenarioConfig *config) |
| |
◆ ScenarioStatus
| Enumerator |
|---|
| STATUS_UNKNOWN | |
| STATUS_PROCESSING | |
| STATUS_DONE | |
◆ Scenario()
| apollo::planning::scenario::Scenario::Scenario |
( |
const ScenarioConfig & |
config, |
|
|
const ScenarioContext * |
context, |
|
|
const std::shared_ptr< DependencyInjector > & |
injector |
|
) |
| |
◆ ~Scenario()
| virtual apollo::planning::scenario::Scenario::~Scenario |
( |
| ) |
|
|
virtualdefault |
◆ CreateStage()
| virtual std::unique_ptr<Stage> apollo::planning::scenario::Scenario::CreateStage |
( |
const ScenarioConfig::StageConfig & |
stage_config, |
|
|
const std::shared_ptr< DependencyInjector > & |
injector |
|
) |
| |
|
pure virtual |
Each scenario should define its own stages object's creation scenario will call stage's Stage::Process function following a configured order, The return value of Stage::Process function determines the transition from one stage to another.
Implemented in apollo::planning::scenario::stop_sign::StopSignUnprotectedScenario, apollo::planning::scenario::traffic_light::TrafficLightUnprotectedRightTurnScenario, apollo::planning::scenario::yield_sign::YieldSignScenario, apollo::planning::scenario::valet_parking::ValetParkingScenario, apollo::planning::scenario::traffic_light::TrafficLightUnprotectedLeftTurnScenario, apollo::planning::scenario::traffic_light::TrafficLightProtectedScenario, apollo::planning::scenario::bare_intersection::BareIntersectionUnprotectedScenario, apollo::planning::scenario::lane_follow::LaneFollowScenario, apollo::planning::scenario::emergency_pull_over::EmergencyPullOverScenario, apollo::planning::scenario::emergency_stop::EmergencyStopScenario, apollo::planning::scenario::pull_over::PullOverScenario, apollo::planning::scenario::LearningModelSampleScenario, apollo::planning::scenario::park_and_go::ParkAndGoScenario, and apollo::planning::scenario::narrow_street_u_turn::NarrowStreetUTurnScenario.
◆ GetMsg()
| const std::string& apollo::planning::scenario::Scenario::GetMsg |
( |
| ) |
const |
|
inline |
◆ GetStage()
| const ScenarioConfig::StageType apollo::planning::scenario::Scenario::GetStage |
( |
| ) |
const |
|
inline |
◆ GetStatus()
| const ScenarioStatus& apollo::planning::scenario::Scenario::GetStatus |
( |
| ) |
const |
|
inline |
◆ Init()
| virtual void apollo::planning::scenario::Scenario::Init |
( |
| ) |
|
|
virtual |
Reimplemented in apollo::planning::scenario::stop_sign::StopSignUnprotectedScenario, apollo::planning::scenario::traffic_light::TrafficLightUnprotectedRightTurnScenario, apollo::planning::scenario::yield_sign::YieldSignScenario, apollo::planning::scenario::valet_parking::ValetParkingScenario, apollo::planning::scenario::traffic_light::TrafficLightUnprotectedLeftTurnScenario, apollo::planning::scenario::traffic_light::TrafficLightProtectedScenario, apollo::planning::scenario::bare_intersection::BareIntersectionUnprotectedScenario, apollo::planning::scenario::emergency_pull_over::EmergencyPullOverScenario, apollo::planning::scenario::emergency_stop::EmergencyStopScenario, apollo::planning::scenario::pull_over::PullOverScenario, apollo::planning::scenario::LearningModelSampleScenario, and apollo::planning::scenario::park_and_go::ParkAndGoScenario.
◆ IsTransferable()
| virtual bool apollo::planning::scenario::Scenario::IsTransferable |
( |
const Scenario & |
other_scenario, |
|
|
const Frame & |
frame |
|
) |
| |
|
inlinevirtual |
◆ LoadConfig()
| static bool apollo::planning::scenario::Scenario::LoadConfig |
( |
const std::string & |
config_file, |
|
|
ScenarioConfig * |
config |
|
) |
| |
|
static |
◆ Name()
| const std::string& apollo::planning::scenario::Scenario::Name |
( |
| ) |
const |
◆ Process()
| virtual ScenarioStatus apollo::planning::scenario::Scenario::Process |
( |
const common::TrajectoryPoint & |
planning_init_point, |
|
|
Frame * |
frame |
|
) |
| |
|
virtual |
◆ scenario_type()
| ScenarioConfig::ScenarioType apollo::planning::scenario::Scenario::scenario_type |
( |
| ) |
const |
|
inline |
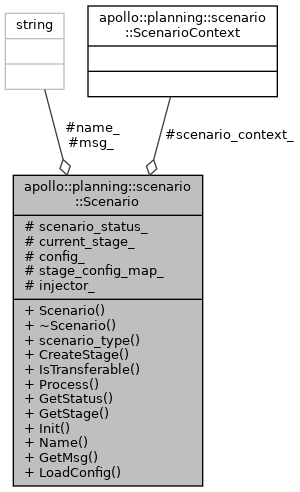
◆ config_
| ScenarioConfig apollo::planning::scenario::Scenario::config_ |
|
protected |
◆ current_stage_
| std::unique_ptr<Stage> apollo::planning::scenario::Scenario::current_stage_ |
|
protected |
◆ injector_
◆ msg_
| std::string apollo::planning::scenario::Scenario::msg_ |
|
protected |
◆ name_
| std::string apollo::planning::scenario::Scenario::name_ |
|
protected |
◆ scenario_context_
| const ScenarioContext* apollo::planning::scenario::Scenario::scenario_context_ = nullptr |
|
protected |
◆ scenario_status_
◆ stage_config_map_
| std::unordered_map<ScenarioConfig::StageType, const ScenarioConfig::StageConfig*, std::hash<int> > apollo::planning::scenario::Scenario::stage_config_map_ |
|
protected |
The documentation for this class was generated from the following file: