#include <emergency_pull_over_scenario.h>
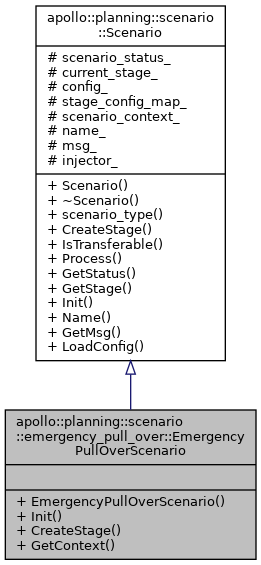
Inheritance diagram for apollo::planning::scenario::emergency_pull_over::EmergencyPullOverScenario:
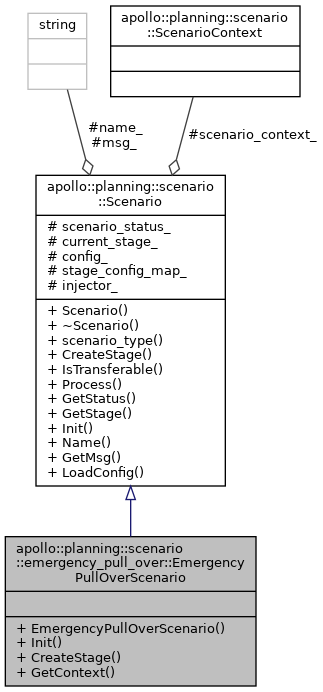
Collaboration diagram for apollo::planning::scenario::emergency_pull_over::EmergencyPullOverScenario:
Public Member Functions | |
| EmergencyPullOverScenario (const ScenarioConfig &config, const ScenarioContext *context, const std::shared_ptr< DependencyInjector > &injector) | |
| void | Init () override |
| std::unique_ptr< Stage > | CreateStage (const ScenarioConfig::StageConfig &stage_config, const std::shared_ptr< DependencyInjector > &injector) |
| EmergencyPullOverContext * | GetContext () |
 Public Member Functions inherited from apollo::planning::scenario::Scenario Public Member Functions inherited from apollo::planning::scenario::Scenario | |
| Scenario (const ScenarioConfig &config, const ScenarioContext *context, const std::shared_ptr< DependencyInjector > &injector) | |
| virtual | ~Scenario ()=default |
| ScenarioConfig::ScenarioType | scenario_type () const |
| virtual bool | IsTransferable (const Scenario &other_scenario, const Frame &frame) |
| virtual ScenarioStatus | Process (const common::TrajectoryPoint &planning_init_point, Frame *frame) |
| const ScenarioStatus & | GetStatus () const |
| const ScenarioConfig::StageType | GetStage () const |
| const std::string & | Name () const |
| const std::string & | GetMsg () const |
Additional Inherited Members | |
| Public Types inherited from apollo::planning::scenario::Scenario | |
| enum | ScenarioStatus { STATUS_UNKNOWN = 0, STATUS_PROCESSING = 1, STATUS_DONE = 2 } |
| Static Public Member Functions inherited from apollo::planning::scenario::Scenario | |
| static bool | LoadConfig (const std::string &config_file, ScenarioConfig *config) |
| Protected Attributes inherited from apollo::planning::scenario::Scenario | |
| ScenarioStatus | scenario_status_ = STATUS_UNKNOWN |
| std::unique_ptr< Stage > | current_stage_ |
| ScenarioConfig | config_ |
| std::unordered_map< ScenarioConfig::StageType, const ScenarioConfig::StageConfig *, std::hash< int > > | stage_config_map_ |
| const ScenarioContext * | scenario_context_ = nullptr |
| std::string | name_ |
| std::string | msg_ |
| std::shared_ptr< DependencyInjector > | injector_ |
Constructor & Destructor Documentation
◆ EmergencyPullOverScenario()
|
inline |
Member Function Documentation
◆ CreateStage()
|
virtual |
Each scenario should define its own stages object's creation scenario will call stage's Stage::Process function following a configured order, The return value of Stage::Process function determines the transition from one stage to another.
Implements apollo::planning::scenario::Scenario.
◆ GetContext()
|
inline |
◆ Init()
|
overridevirtual |
Reimplemented from apollo::planning::scenario::Scenario.
The documentation for this class was generated from the following file:
- modules/planning/scenarios/emergency/emergency_pull_over/emergency_pull_over_scenario.h
