#include <reference_point.h>
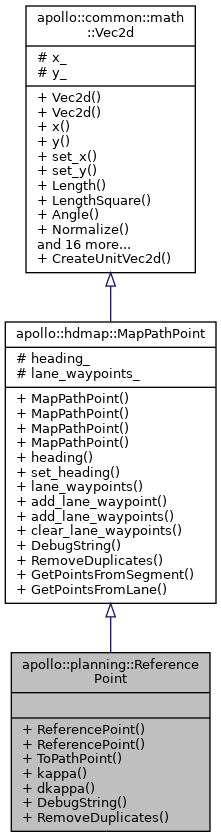
Inheritance diagram for apollo::planning::ReferencePoint:
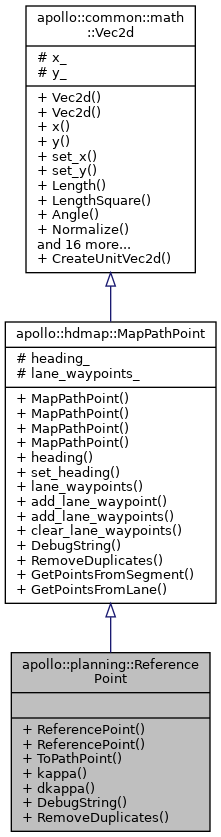
Collaboration diagram for apollo::planning::ReferencePoint:
Public Member Functions | |
| ReferencePoint ()=default | |
| ReferencePoint (const MapPathPoint &map_path_point, const double kappa, const double dkappa) | |
| common::PathPoint | ToPathPoint (double s) const |
| double | kappa () const |
| double | dkappa () const |
| std::string | DebugString () const |
 Public Member Functions inherited from apollo::hdmap::MapPathPoint Public Member Functions inherited from apollo::hdmap::MapPathPoint | |
| MapPathPoint ()=default | |
| MapPathPoint (const common::math::Vec2d &point, double heading) | |
| MapPathPoint (const common::math::Vec2d &point, double heading, LaneWaypoint lane_waypoint) | |
| MapPathPoint (const common::math::Vec2d &point, double heading, std::vector< LaneWaypoint > lane_waypoints) | |
| double | heading () const |
| void | set_heading (const double heading) |
| const std::vector< LaneWaypoint > & | lane_waypoints () const |
| void | add_lane_waypoint (LaneWaypoint lane_waypoint) |
| void | add_lane_waypoints (const std::vector< LaneWaypoint > &lane_waypoints) |
| void | clear_lane_waypoints () |
| std::string | DebugString () const |
| Public Member Functions inherited from apollo::common::math::Vec2d | |
| constexpr | Vec2d (const double x, const double y) noexcept |
| Constructor which takes x- and y-coordinates. More... | |
| constexpr | Vec2d () noexcept |
| Constructor returning the zero vector. More... | |
| double | x () const |
| Getter for x component. More... | |
| double | y () const |
| Getter for y component. More... | |
| void | set_x (const double x) |
| Setter for x component. More... | |
| void | set_y (const double y) |
| Setter for y component. More... | |
| double | Length () const |
| Gets the length of the vector. More... | |
| double | LengthSquare () const |
| Gets the squared length of the vector. More... | |
| double | Angle () const |
| Gets the angle between the vector and the positive x semi-axis. More... | |
| void | Normalize () |
| Returns the unit vector that is co-linear with this vector. More... | |
| double | DistanceTo (const Vec2d &other) const |
| Returns the distance to the given vector. More... | |
| double | DistanceSquareTo (const Vec2d &other) const |
| Returns the squared distance to the given vector. More... | |
| double | CrossProd (const Vec2d &other) const |
| Returns the "cross" product between these two Vec2d (non-standard). More... | |
| double | InnerProd (const Vec2d &other) const |
| Returns the inner product between these two Vec2d. More... | |
| Vec2d | rotate (const double angle) const |
| rotate the vector by angle. More... | |
| void | SelfRotate (const double angle) |
| rotate the vector itself by angle. More... | |
| Vec2d | operator+ (const Vec2d &other) const |
| Sums two Vec2d. More... | |
| Vec2d | operator- (const Vec2d &other) const |
| Subtracts two Vec2d. More... | |
| Vec2d | operator* (const double ratio) const |
| Multiplies Vec2d by a scalar. More... | |
| Vec2d | operator/ (const double ratio) const |
| Divides Vec2d by a scalar. More... | |
| Vec2d & | operator+= (const Vec2d &other) |
| Sums another Vec2d to the current one. More... | |
| Vec2d & | operator-= (const Vec2d &other) |
| Subtracts another Vec2d to the current one. More... | |
| Vec2d & | operator*= (const double ratio) |
| Multiplies this Vec2d by a scalar. More... | |
| Vec2d & | operator/= (const double ratio) |
| Divides this Vec2d by a scalar. More... | |
| bool | operator== (const Vec2d &other) const |
| Compares two Vec2d. More... | |
| std::string | DebugString () const |
| Returns a human-readable string representing this object. More... | |
Static Public Member Functions | |
| static void | RemoveDuplicates (std::vector< ReferencePoint > *points) |
| Static Public Member Functions inherited from apollo::hdmap::MapPathPoint | |
| static void | RemoveDuplicates (std::vector< MapPathPoint > *points) |
| static std::vector< MapPathPoint > | GetPointsFromSegment (const LaneSegment &segment) |
| static std::vector< MapPathPoint > | GetPointsFromLane (LaneInfoConstPtr lane, const double start_s, const double end_s) |
| Static Public Member Functions inherited from apollo::common::math::Vec2d | |
| static Vec2d | CreateUnitVec2d (const double angle) |
| Creates a unit-vector with a given angle to the positive x semi-axis. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from apollo::hdmap::MapPathPoint | |
| double | heading_ = 0.0 |
| std::vector< LaneWaypoint > | lane_waypoints_ |
| Protected Attributes inherited from apollo::common::math::Vec2d | |
| double | x_ = 0.0 |
| double | y_ = 0.0 |
Constructor & Destructor Documentation
◆ ReferencePoint() [1/2]
|
default |
◆ ReferencePoint() [2/2]
| apollo::planning::ReferencePoint::ReferencePoint | ( | const MapPathPoint & | map_path_point, |
| const double | kappa, | ||
| const double | dkappa | ||
| ) |
Member Function Documentation
◆ DebugString()
| std::string apollo::planning::ReferencePoint::DebugString | ( | ) | const |
◆ dkappa()
| double apollo::planning::ReferencePoint::dkappa | ( | ) | const |
◆ kappa()
| double apollo::planning::ReferencePoint::kappa | ( | ) | const |
◆ RemoveDuplicates()
|
static |
◆ ToPathPoint()
| common::PathPoint apollo::planning::ReferencePoint::ToPathPoint | ( | double | s | ) | const |
The documentation for this class was generated from the following file:
- modules/planning/reference_line/reference_point.h
