#include <planning_base.h>
|
| virtual void | FillPlanningPb (const double timestamp, ADCTrajectory *const trajectory_pb) |
| |
◆ PlanningBase() [1/2]
| apollo::planning::PlanningBase::PlanningBase |
( |
| ) |
|
|
delete |
◆ PlanningBase() [2/2]
| apollo::planning::PlanningBase::PlanningBase |
( |
const std::shared_ptr< DependencyInjector > & |
injector | ) |
|
|
explicit |
◆ ~PlanningBase()
| virtual apollo::planning::PlanningBase::~PlanningBase |
( |
| ) |
|
|
virtual |
◆ FillPlanningPb()
| virtual void apollo::planning::PlanningBase::FillPlanningPb |
( |
const double |
timestamp, |
|
|
ADCTrajectory *const |
trajectory_pb |
|
) |
| |
|
protectedvirtual |
◆ Init()
◆ Name()
| virtual std::string apollo::planning::PlanningBase::Name |
( |
| ) |
const |
|
pure virtual |
◆ Plan()
| virtual apollo::common::Status apollo::planning::PlanningBase::Plan |
( |
const double |
current_time_stamp, |
|
|
const std::vector< common::TrajectoryPoint > & |
stitching_trajectory, |
|
|
ADCTrajectory *const |
trajectory |
|
) |
| |
|
pure virtual |
◆ RunOnce()
| virtual void apollo::planning::PlanningBase::RunOnce |
( |
const LocalView & |
local_view, |
|
|
ADCTrajectory *const |
adc_trajectory |
|
) |
| |
|
pure virtual |
◆ config_
| PlanningConfig apollo::planning::PlanningBase::config_ |
|
protected |
◆ frame_
| std::unique_ptr<Frame> apollo::planning::PlanningBase::frame_ |
|
protected |
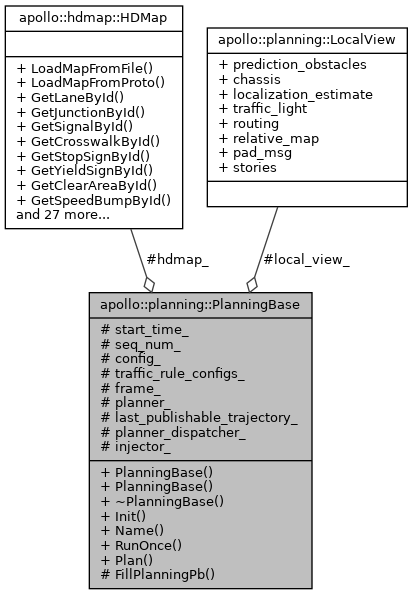
◆ hdmap_
| const hdmap::HDMap* apollo::planning::PlanningBase::hdmap_ = nullptr |
|
protected |
◆ injector_
◆ last_publishable_trajectory_
◆ local_view_
| LocalView apollo::planning::PlanningBase::local_view_ |
|
protected |
◆ planner_
| std::unique_ptr<Planner> apollo::planning::PlanningBase::planner_ |
|
protected |
◆ planner_dispatcher_
| std::unique_ptr<PlannerDispatcher> apollo::planning::PlanningBase::planner_dispatcher_ |
|
protected |
◆ seq_num_
| size_t apollo::planning::PlanningBase::seq_num_ = 0 |
|
protected |
◆ start_time_
| double apollo::planning::PlanningBase::start_time_ = 0.0 |
|
protected |
◆ traffic_rule_configs_
| TrafficRuleConfigs apollo::planning::PlanningBase::traffic_rule_configs_ |
|
protected |
The documentation for this class was generated from the following file: