#include <ultrasonic_radar_message_manager.h>
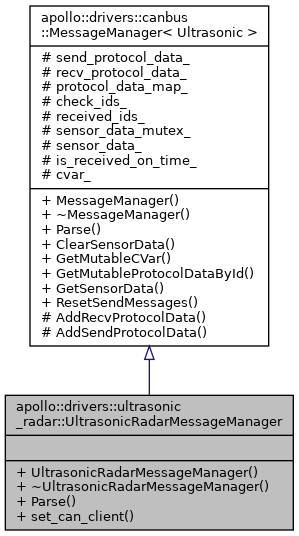
Inheritance diagram for apollo::drivers::ultrasonic_radar::UltrasonicRadarMessageManager:
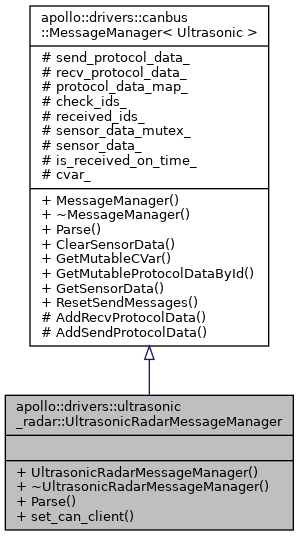
Collaboration diagram for apollo::drivers::ultrasonic_radar::UltrasonicRadarMessageManager:
Public Member Functions | |
| UltrasonicRadarMessageManager (const int entrance_num, const std::shared_ptr<::apollo::cyber::Writer< Ultrasonic >> &writer) | |
| virtual | ~UltrasonicRadarMessageManager ()=default |
| void | Parse (const uint32_t message_id, const uint8_t *data, int32_t length) |
| parse data and store parsed info in protocol data More... | |
| void | set_can_client (std::shared_ptr< CanClient > can_client) |
 Public Member Functions inherited from apollo::drivers::canbus::MessageManager< Ultrasonic > Public Member Functions inherited from apollo::drivers::canbus::MessageManager< Ultrasonic > | |
| MessageManager () | |
| virtual | ~MessageManager ()=default |
| void | ClearSensorData () |
| std::condition_variable * | GetMutableCVar () |
| ProtocolData< Ultrasonic > * | GetMutableProtocolDataById (const uint32_t message_id) |
| get mutable protocol data by message id More... | |
| common::ErrorCode | GetSensorData (Ultrasonic *const sensor_data) |
| get chassis detail. used lock_guard in this function to avoid concurrent read/write issue. More... | |
| void | ResetSendMessages () |
Additional Inherited Members | |
| Protected Member Functions inherited from apollo::drivers::canbus::MessageManager< Ultrasonic > | |
| void | AddRecvProtocolData () |
| void | AddSendProtocolData () |
| Protected Attributes inherited from apollo::drivers::canbus::MessageManager< Ultrasonic > | |
| std::vector< std::unique_ptr< ProtocolData< Ultrasonic > > > | send_protocol_data_ |
| std::vector< std::unique_ptr< ProtocolData< Ultrasonic > > > | recv_protocol_data_ |
| std::unordered_map< uint32_t, ProtocolData< Ultrasonic > *> | protocol_data_map_ |
| std::unordered_map< uint32_t, CheckIdArg > | check_ids_ |
| std::set< uint32_t > | received_ids_ |
| std::mutex | sensor_data_mutex_ |
| Ultrasonic | sensor_data_ |
| bool | is_received_on_time_ |
| std::condition_variable | cvar_ |
Constructor & Destructor Documentation
◆ UltrasonicRadarMessageManager()
| apollo::drivers::ultrasonic_radar::UltrasonicRadarMessageManager::UltrasonicRadarMessageManager | ( | const int | entrance_num, |
| const std::shared_ptr<::apollo::cyber::Writer< Ultrasonic >> & | writer | ||
| ) |
◆ ~UltrasonicRadarMessageManager()
|
virtualdefault |
Member Function Documentation
◆ Parse()
|
virtual |
parse data and store parsed info in protocol data
- Parameters
-
message_id the id of the message data a pointer to the data array to be parsed length the length of data array
Reimplemented from apollo::drivers::canbus::MessageManager< Ultrasonic >.
◆ set_can_client()
| void apollo::drivers::ultrasonic_radar::UltrasonicRadarMessageManager::set_can_client | ( | std::shared_ptr< CanClient > | can_client | ) |
The documentation for this class was generated from the following file:
- modules/drivers/radar/ultrasonic_radar/ultrasonic_radar_message_manager.h
