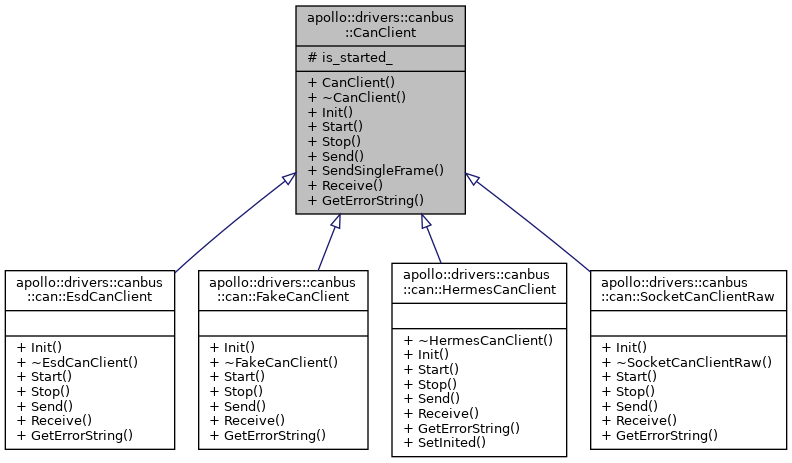
The class which defines the CAN client to send and receive message. More...
#include <can_client.h>
Public Member Functions | |
| CanClient ()=default | |
| Constructor. More... | |
| virtual | ~CanClient ()=default |
| Destructor. More... | |
| virtual bool | Init (const CANCardParameter ¶meter)=0 |
| Initialize the CAN client by specified CAN card parameters. More... | |
| virtual apollo::common::ErrorCode | Start ()=0 |
| Start the CAN client. More... | |
| virtual void | Stop ()=0 |
| Stop the CAN client. More... | |
| virtual apollo::common::ErrorCode | Send (const std::vector< CanFrame > &frames, int32_t *const frame_num)=0 |
| Send messages. More... | |
| virtual apollo::common::ErrorCode | SendSingleFrame (const std::vector< CanFrame > &frames) |
| Send a single message. More... | |
| virtual apollo::common::ErrorCode | Receive (std::vector< CanFrame > *const frames, int32_t *const frame_num)=0 |
| Receive messages. More... | |
| virtual std::string | GetErrorString (const int32_t status)=0 |
| Get the error string. More... | |
Protected Attributes | |
| bool | is_started_ = false |
| The CAN client is started. More... | |
Detailed Description
The class which defines the CAN client to send and receive message.
Constructor & Destructor Documentation
◆ CanClient()
|
default |
Constructor.
◆ ~CanClient()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ GetErrorString()
|
pure virtual |
Get the error string.
- Parameters
-
status The status to get the error string.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
◆ Init()
|
pure virtual |
Initialize the CAN client by specified CAN card parameters.
- Parameters
-
parameter CAN card parameters to initialize the CAN client.
- Returns
- If the initialization is successful.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
◆ Receive()
|
pure virtual |
Receive messages.
- Parameters
-
frames The messages to receive. frame_num The amount of messages to receive.
- Returns
- The status of the receiving action which is defined by apollo::common::ErrorCode.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
◆ Send()
|
pure virtual |
Send messages.
- Parameters
-
frames The messages to send. frame_num The amount of messages to send.
- Returns
- The status of the sending action which is defined by apollo::common::ErrorCode.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
◆ SendSingleFrame()
|
inlinevirtual |
Send a single message.
- Parameters
-
frames A single-element vector containing only one message.
- Returns
- The status of the sending single message action which is defined by apollo::common::ErrorCode.
◆ Start()
|
pure virtual |
Start the CAN client.
- Returns
- The status of the start action which is defined by apollo::common::ErrorCode.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
◆ Stop()
|
pure virtual |
Stop the CAN client.
Implemented in apollo::drivers::canbus::can::SocketCanClientRaw, apollo::drivers::canbus::can::HermesCanClient, apollo::drivers::canbus::can::EsdCanClient, and apollo::drivers::canbus::can::FakeCanClient.
Member Data Documentation
◆ is_started_
|
protected |
The CAN client is started.
The documentation for this class was generated from the following file:
- modules/drivers/canbus/can_client/can_client.h
