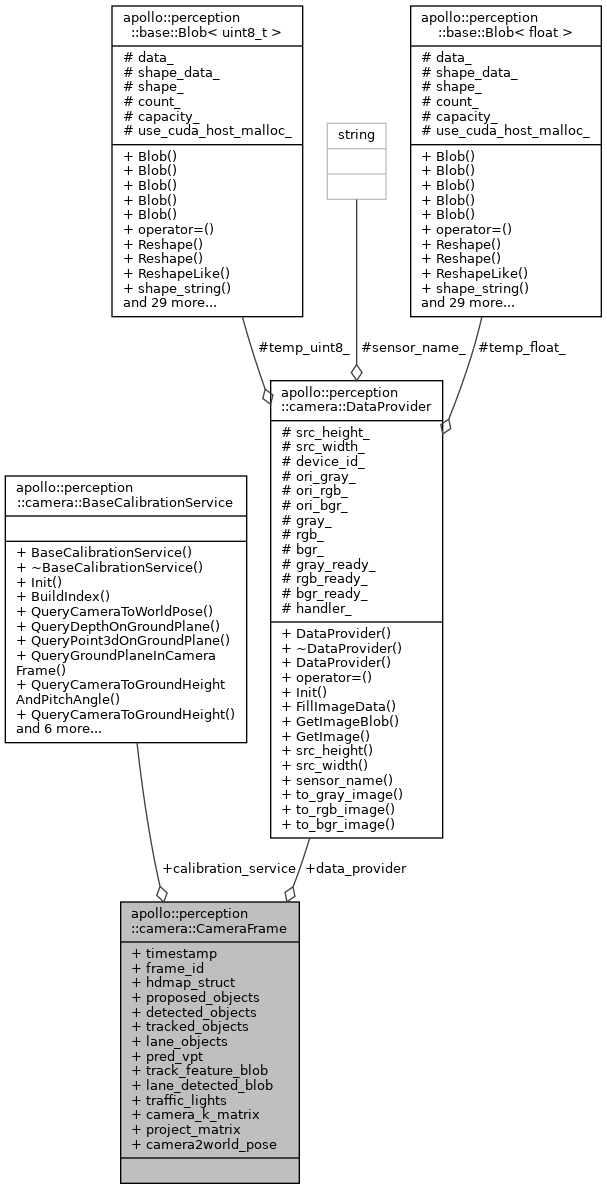
#include <camera_frame.h>
◆ calibration_service
◆ camera2world_pose
| Eigen::Affine3d apollo::perception::camera::CameraFrame::camera2world_pose = Eigen::Affine3d::Identity() |
◆ camera_k_matrix
| Eigen::Matrix3f apollo::perception::camera::CameraFrame::camera_k_matrix = Eigen::Matrix3f::Identity() |
◆ data_provider
| DataProvider* apollo::perception::camera::CameraFrame::data_provider = nullptr |
◆ detected_objects
| std::vector<base::ObjectPtr> apollo::perception::camera::CameraFrame::detected_objects |
◆ frame_id
| int apollo::perception::camera::CameraFrame::frame_id = 0 |
◆ hdmap_struct
◆ lane_detected_blob
| std::shared_ptr<base::Blob<float> > apollo::perception::camera::CameraFrame::lane_detected_blob = nullptr |
◆ lane_objects
| std::vector<base::LaneLine> apollo::perception::camera::CameraFrame::lane_objects |
◆ pred_vpt
| std::vector<float> apollo::perception::camera::CameraFrame::pred_vpt |
◆ project_matrix
| Eigen::Matrix3d apollo::perception::camera::CameraFrame::project_matrix = Eigen::Matrix3d::Identity() |
◆ proposed_objects
| std::vector<base::ObjectPtr> apollo::perception::camera::CameraFrame::proposed_objects |
◆ timestamp
| double apollo::perception::camera::CameraFrame::timestamp = 0.0 |
◆ track_feature_blob
| std::shared_ptr<base::Blob<float> > apollo::perception::camera::CameraFrame::track_feature_blob = nullptr |
◆ tracked_objects
| std::vector<base::ObjectPtr> apollo::perception::camera::CameraFrame::tracked_objects |
◆ traffic_lights
The documentation for this struct was generated from the following file: