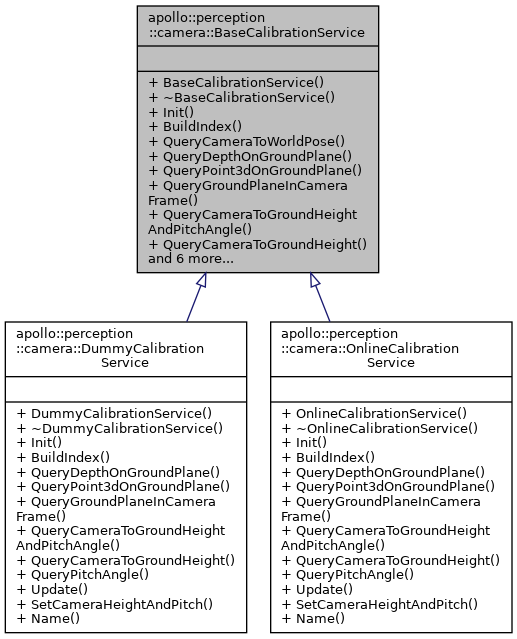
#include <base_calibration_service.h>
◆ BaseCalibrationService() [1/2]
| apollo::perception::camera::BaseCalibrationService::BaseCalibrationService |
( |
| ) |
|
|
default |
◆ ~BaseCalibrationService()
| virtual apollo::perception::camera::BaseCalibrationService::~BaseCalibrationService |
( |
| ) |
|
|
virtualdefault |
◆ BaseCalibrationService() [2/2]
◆ BuildIndex()
| virtual bool apollo::perception::camera::BaseCalibrationService::BuildIndex |
( |
| ) |
|
|
pure virtual |
◆ Init()
◆ Name()
| virtual std::string apollo::perception::camera::BaseCalibrationService::Name |
( |
| ) |
const |
|
pure virtual |
◆ operator=()
◆ QueryCameraToGroundHeight()
| virtual float apollo::perception::camera::BaseCalibrationService::QueryCameraToGroundHeight |
( |
| ) |
const |
|
inlinevirtual |
◆ QueryCameraToGroundHeightAndPitchAngle()
| virtual bool apollo::perception::camera::BaseCalibrationService::QueryCameraToGroundHeightAndPitchAngle |
( |
float * |
height, |
|
|
float * |
pitch |
|
) |
| const |
|
inlinevirtual |
◆ QueryCameraToWorldPose()
| virtual bool apollo::perception::camera::BaseCalibrationService::QueryCameraToWorldPose |
( |
Eigen::Matrix4d * |
pose | ) |
const |
|
inlinevirtual |
◆ QueryDepthOnGroundPlane()
| virtual bool apollo::perception::camera::BaseCalibrationService::QueryDepthOnGroundPlane |
( |
int |
x, |
|
|
int |
y, |
|
|
double * |
depth |
|
) |
| const |
|
inlinevirtual |
◆ QueryGroundPlaneInCameraFrame()
| virtual bool apollo::perception::camera::BaseCalibrationService::QueryGroundPlaneInCameraFrame |
( |
Eigen::Vector4d * |
plane_param | ) |
const |
|
inlinevirtual |
◆ QueryPitchAngle()
| virtual float apollo::perception::camera::BaseCalibrationService::QueryPitchAngle |
( |
| ) |
const |
|
inlinevirtual |
◆ QueryPoint3dOnGroundPlane()
| virtual bool apollo::perception::camera::BaseCalibrationService::QueryPoint3dOnGroundPlane |
( |
int |
x, |
|
|
int |
y, |
|
|
Eigen::Vector3d * |
point3d |
|
) |
| const |
|
inlinevirtual |
◆ SetCameraHeightAndPitch()
| virtual void apollo::perception::camera::BaseCalibrationService::SetCameraHeightAndPitch |
( |
const std::map< std::string, float > & |
name_camera_ground_height_map, |
|
|
const std::map< std::string, float > & |
name_camera_pitch_angle_diff_map, |
|
|
const float & |
pitch_angle_master_sensor |
|
) |
| |
|
inlinevirtual |
◆ Update()
| virtual void apollo::perception::camera::BaseCalibrationService::Update |
( |
CameraFrame * |
frame | ) |
|
|
inlinevirtual |
The documentation for this class was generated from the following file: