#include <localization_params.h>
◆ ant_imu_leverarm_file
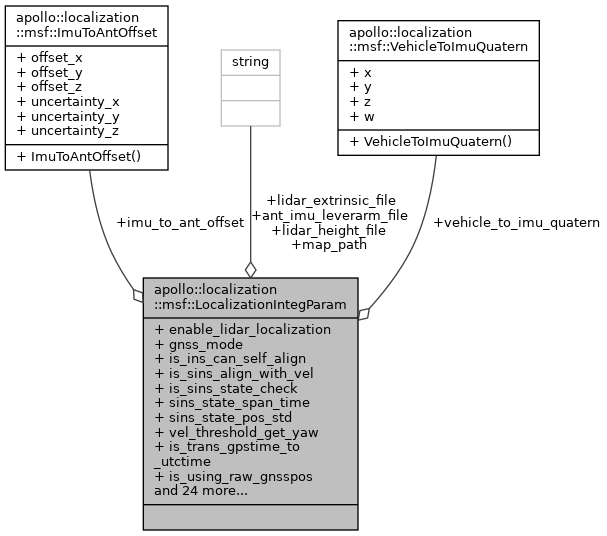
| std::string apollo::localization::msf::LocalizationIntegParam::ant_imu_leverarm_file = "" |
◆ bestgnsspose_loss_time_threshold
| double apollo::localization::msf::LocalizationIntegParam::bestgnsspose_loss_time_threshold = 2.0 |
◆ enable_ins_aid_rtk
| bool apollo::localization::msf::LocalizationIntegParam::enable_ins_aid_rtk = false |
◆ enable_lidar_localization
| bool apollo::localization::msf::LocalizationIntegParam::enable_lidar_localization = true |
◆ gnss_mode
| int apollo::localization::msf::LocalizationIntegParam::gnss_mode = 0 |
◆ if_use_avx
| bool apollo::localization::msf::LocalizationIntegParam::if_use_avx = false |
◆ imu_delay_time_threshold_1
| double apollo::localization::msf::LocalizationIntegParam::imu_delay_time_threshold_1 = 0.1 |
◆ imu_delay_time_threshold_2
| double apollo::localization::msf::LocalizationIntegParam::imu_delay_time_threshold_2 = 0.05 |
◆ imu_delay_time_threshold_3
| double apollo::localization::msf::LocalizationIntegParam::imu_delay_time_threshold_3 = 0.02 |
◆ imu_lidar_max_delay_time
| double apollo::localization::msf::LocalizationIntegParam::imu_lidar_max_delay_time = 0.4 |
◆ imu_missing_time_threshold_1
| double apollo::localization::msf::LocalizationIntegParam::imu_missing_time_threshold_1 = 0.1 |
◆ imu_missing_time_threshold_2
| double apollo::localization::msf::LocalizationIntegParam::imu_missing_time_threshold_2 = 0.05 |
◆ imu_missing_time_threshold_3
| double apollo::localization::msf::LocalizationIntegParam::imu_missing_time_threshold_3 = 0.01 |
◆ imu_to_ant_offset
| ImuToAntOffset apollo::localization::msf::LocalizationIntegParam::imu_to_ant_offset |
◆ is_ins_can_self_align
| bool apollo::localization::msf::LocalizationIntegParam::is_ins_can_self_align = false |
◆ is_lidar_unstable_reset
| bool apollo::localization::msf::LocalizationIntegParam::is_lidar_unstable_reset = true |
◆ is_sins_align_with_vel
| bool apollo::localization::msf::LocalizationIntegParam::is_sins_align_with_vel = true |
◆ is_sins_state_check
| bool apollo::localization::msf::LocalizationIntegParam::is_sins_state_check = false |
◆ is_trans_gpstime_to_utctime
| bool apollo::localization::msf::LocalizationIntegParam::is_trans_gpstime_to_utctime = true |
◆ is_using_novatel_heading
| bool apollo::localization::msf::LocalizationIntegParam::is_using_novatel_heading = true |
◆ is_using_raw_gnsspos
| bool apollo::localization::msf::LocalizationIntegParam::is_using_raw_gnsspos = true |
◆ lidar_extrinsic_file
| std::string apollo::localization::msf::LocalizationIntegParam::lidar_extrinsic_file = "" |
◆ lidar_filter_size
| int apollo::localization::msf::LocalizationIntegParam::lidar_filter_size = 17 |
◆ lidar_height_default
| double apollo::localization::msf::LocalizationIntegParam::lidar_height_default = 1.7 |
◆ lidar_height_file
| std::string apollo::localization::msf::LocalizationIntegParam::lidar_height_file = "" |
◆ lidar_loss_time_threshold
| double apollo::localization::msf::LocalizationIntegParam::lidar_loss_time_threshold = 2.0 |
◆ lidar_yaw_align_mode
| int apollo::localization::msf::LocalizationIntegParam::lidar_yaw_align_mode = 2 |
◆ localization_mode
| int apollo::localization::msf::LocalizationIntegParam::localization_mode = 2 |
◆ localization_std_x_threshold_1
| double apollo::localization::msf::LocalizationIntegParam::localization_std_x_threshold_1 = 0.15 |
◆ localization_std_x_threshold_2
| double apollo::localization::msf::LocalizationIntegParam::localization_std_x_threshold_2 = 0.3 |
◆ localization_std_y_threshold_1
| double apollo::localization::msf::LocalizationIntegParam::localization_std_y_threshold_1 = 0.15 |
◆ localization_std_y_threshold_2
| double apollo::localization::msf::LocalizationIntegParam::localization_std_y_threshold_2 = 0.3 |
◆ map_coverage_theshold
| double apollo::localization::msf::LocalizationIntegParam::map_coverage_theshold = 0.8 |
◆ map_path
| std::string apollo::localization::msf::LocalizationIntegParam::map_path = "" |
◆ sins_state_pos_std
| double apollo::localization::msf::LocalizationIntegParam::sins_state_pos_std = 1.0 |
◆ sins_state_span_time
| double apollo::localization::msf::LocalizationIntegParam::sins_state_span_time = 60.0 |
◆ unstable_reset_threshold
| double apollo::localization::msf::LocalizationIntegParam::unstable_reset_threshold = 0.3 |
◆ utm_zone_id
| int apollo::localization::msf::LocalizationIntegParam::utm_zone_id = 50 |
◆ vehicle_to_imu_quatern
◆ vel_threshold_get_yaw
| double apollo::localization::msf::LocalizationIntegParam::vel_threshold_get_yaw = 5.0 |
The documentation for this struct was generated from the following file: