#include <quintic_spiral_path.h>
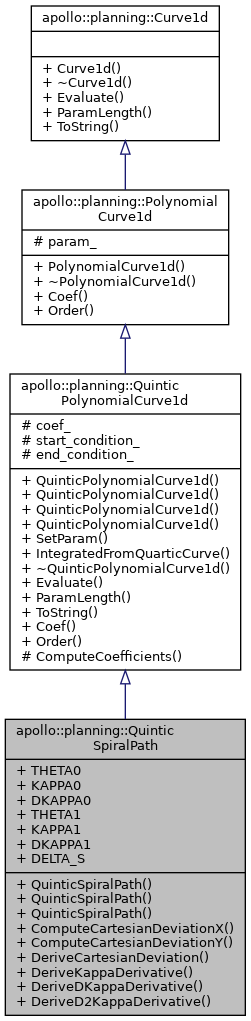
Inheritance diagram for apollo::planning::QuinticSpiralPath:
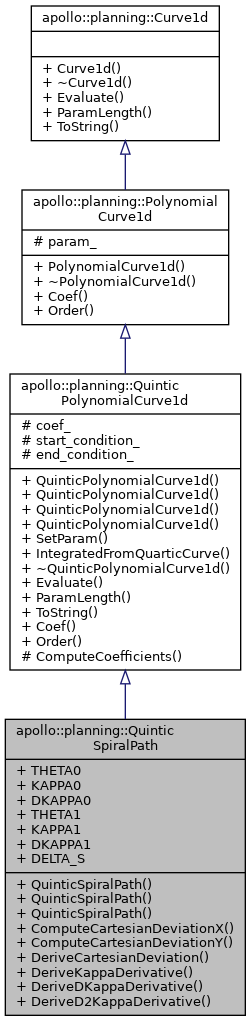
Collaboration diagram for apollo::planning::QuinticSpiralPath:
Public Member Functions | |
| QuinticSpiralPath ()=default | |
| QuinticSpiralPath (const std::array< double, 3 > &start, const std::array< double, 3 > &end, const double delta_s) | |
| QuinticSpiralPath (const double theta0, const double kappa0, const double dkappa0, const double theta1, const double kappa1, const double dkappa1, const double delta_s) | |
| template<size_t N> | |
| double | ComputeCartesianDeviationX (const double s) const |
| template<size_t N> | |
| double | ComputeCartesianDeviationY (const double s) const |
| template<size_t N> | |
| std::pair< double, double > | DeriveCartesianDeviation (const size_t param_index) const |
| double | DeriveKappaDerivative (const size_t param_index, const double ratio) const |
| double | DeriveDKappaDerivative (const size_t param_index, const double ratio) const |
| double | DeriveD2KappaDerivative (const size_t param_index, const double r) const |
 Public Member Functions inherited from apollo::planning::QuinticPolynomialCurve1d Public Member Functions inherited from apollo::planning::QuinticPolynomialCurve1d | |
| QuinticPolynomialCurve1d ()=default | |
| QuinticPolynomialCurve1d (const std::array< double, 3 > &start, const std::array< double, 3 > &end, const double param) | |
| QuinticPolynomialCurve1d (const double x0, const double dx0, const double ddx0, const double x1, const double dx1, const double ddx1, const double param) | |
| QuinticPolynomialCurve1d (const QuinticPolynomialCurve1d &other) | |
| void | SetParam (const double x0, const double dx0, const double ddx0, const double x1, const double dx1, const double ddx1, const double param) |
| void | IntegratedFromQuarticCurve (const PolynomialCurve1d &other, const double init_value) |
| virtual | ~QuinticPolynomialCurve1d ()=default |
| double | Evaluate (const std::uint32_t order, const double p) const override |
| double | ParamLength () const override |
| std::string | ToString () const override |
| double | Coef (const size_t order) const override |
| size_t | Order () const override |
| Public Member Functions inherited from apollo::planning::PolynomialCurve1d | |
| PolynomialCurve1d ()=default | |
| virtual | ~PolynomialCurve1d ()=default |
| Public Member Functions inherited from apollo::planning::Curve1d | |
| Curve1d ()=default | |
| virtual | ~Curve1d ()=default |
Static Public Attributes | |
| static const size_t | THETA0 = 0 |
| static const size_t | KAPPA0 = 1 |
| static const size_t | DKAPPA0 = 2 |
| static const size_t | THETA1 = 3 |
| static const size_t | KAPPA1 = 4 |
| static const size_t | DKAPPA1 = 5 |
| static const size_t | DELTA_S = 6 |
Additional Inherited Members | |
| Protected Member Functions inherited from apollo::planning::QuinticPolynomialCurve1d | |
| void | ComputeCoefficients (const double x0, const double dx0, const double ddx0, const double x1, const double dx1, const double ddx1, const double param) |
| Protected Attributes inherited from apollo::planning::QuinticPolynomialCurve1d | |
| std::array< double, 6 > | coef_ {{0.0, 0.0, 0.0, 0.0, 0.0, 0.0}} |
| std::array< double, 3 > | start_condition_ {{0.0, 0.0, 0.0}} |
| std::array< double, 3 > | end_condition_ {{0.0, 0.0, 0.0}} |
| Protected Attributes inherited from apollo::planning::PolynomialCurve1d | |
| double | param_ = 0.0 |
Detailed Description
Describe a quintic spiral path Map (theta0, kappa0, dkappa0) --— delta_s --—> (theta1, kappa1, dkappa1)
Constructor & Destructor Documentation
◆ QuinticSpiralPath() [1/3]
|
default |
◆ QuinticSpiralPath() [2/3]
| apollo::planning::QuinticSpiralPath::QuinticSpiralPath | ( | const std::array< double, 3 > & | start, |
| const std::array< double, 3 > & | end, | ||
| const double | delta_s | ||
| ) |
◆ QuinticSpiralPath() [3/3]
| apollo::planning::QuinticSpiralPath::QuinticSpiralPath | ( | const double | theta0, |
| const double | kappa0, | ||
| const double | dkappa0, | ||
| const double | theta1, | ||
| const double | kappa1, | ||
| const double | dkappa1, | ||
| const double | delta_s | ||
| ) |
Member Function Documentation
◆ ComputeCartesianDeviationX()
template<size_t N>
|
inline |
◆ ComputeCartesianDeviationY()
template<size_t N>
|
inline |
◆ DeriveCartesianDeviation()
template<size_t N>
|
inline |
◆ DeriveD2KappaDerivative()
| double apollo::planning::QuinticSpiralPath::DeriveD2KappaDerivative | ( | const size_t | param_index, |
| const double | r | ||
| ) | const |
◆ DeriveDKappaDerivative()
| double apollo::planning::QuinticSpiralPath::DeriveDKappaDerivative | ( | const size_t | param_index, |
| const double | ratio | ||
| ) | const |
◆ DeriveKappaDerivative()
| double apollo::planning::QuinticSpiralPath::DeriveKappaDerivative | ( | const size_t | param_index, |
| const double | ratio | ||
| ) | const |
Member Data Documentation
◆ DELTA_S
|
static |
◆ DKAPPA0
|
static |
◆ DKAPPA1
|
static |
◆ KAPPA0
|
static |
◆ KAPPA1
|
static |
◆ THETA0
|
static |
◆ THETA1
|
static |
The documentation for this class was generated from the following file:
- modules/planning/math/curve1d/quintic_spiral_path.h
