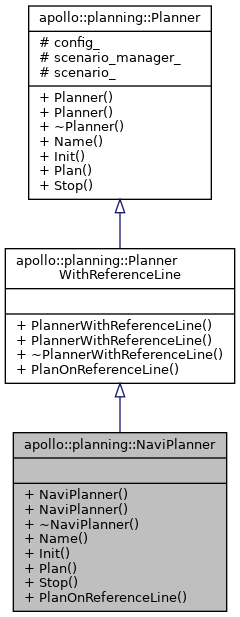
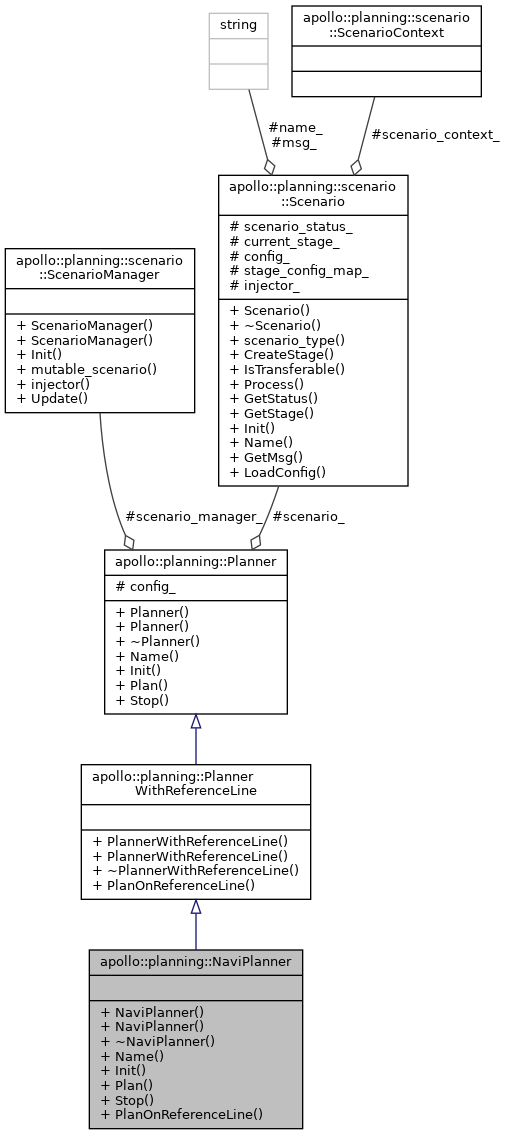
NaviPlanner is a planner based on real-time relative maps. It uses the vehicle's FLU (Front-Left-Up) coordinate system to accomplish tasks such as cruising, following, overtaking, nudging, changing lanes and stopping. Note that NaviPlanner is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
More...
#include <navi_planner.h>
NaviPlanner is a planner based on real-time relative maps. It uses the vehicle's FLU (Front-Left-Up) coordinate system to accomplish tasks such as cruising, following, overtaking, nudging, changing lanes and stopping. Note that NaviPlanner is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
◆ NaviPlanner() [1/2]
| apollo::planning::NaviPlanner::NaviPlanner |
( |
| ) |
|
|
delete |
◆ NaviPlanner() [2/2]
| apollo::planning::NaviPlanner::NaviPlanner |
( |
const std::shared_ptr< DependencyInjector > & |
injector | ) |
|
|
inlineexplicit |
◆ ~NaviPlanner()
| virtual apollo::planning::NaviPlanner::~NaviPlanner |
( |
| ) |
|
|
virtualdefault |
◆ Init()
| common::Status apollo::planning::NaviPlanner::Init |
( |
const PlanningConfig & |
config | ) |
|
|
overridevirtual |
◆ Name()
| std::string apollo::planning::NaviPlanner::Name |
( |
| ) |
|
|
inlineoverridevirtual |
◆ Plan()
| common::Status apollo::planning::NaviPlanner::Plan |
( |
const common::TrajectoryPoint & |
planning_init_point, |
|
|
Frame * |
frame, |
|
|
ADCTrajectory * |
ptr_computed_trajectory |
|
) |
| |
|
overridevirtual |
Override function Plan in parent class Planner.
- Parameters
-
| planning_init_point | The trajectory point where planning starts. |
| frame | Current planning frame. |
- Returns
- OK if planning succeeds; error otherwise.
Implements apollo::planning::Planner.
◆ PlanOnReferenceLine()
Override function Plan in parent class Planner.
- Parameters
-
| planning_init_point | The trajectory point where planning starts. |
| frame | Current planning frame. |
| reference_line_info | The computed reference line. |
- Returns
- OK if planning succeeds; error otherwise.
Reimplemented from apollo::planning::PlannerWithReferenceLine.
◆ Stop()
| void apollo::planning::NaviPlanner::Stop |
( |
void |
| ) |
|
|
inlineoverridevirtual |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::planning::PlannerWithReferenceLine
Public Member Functions inherited from apollo::planning::PlannerWithReferenceLine