#include <lattice_planner.h>
◆ LatticePlanner() [1/2]
| apollo::planning::LatticePlanner::LatticePlanner |
( |
| ) |
|
|
delete |
◆ LatticePlanner() [2/2]
| apollo::planning::LatticePlanner::LatticePlanner |
( |
const std::shared_ptr< DependencyInjector > & |
injector | ) |
|
|
inlineexplicit |
◆ ~LatticePlanner()
| virtual apollo::planning::LatticePlanner::~LatticePlanner |
( |
| ) |
|
|
virtualdefault |
◆ Init()
| common::Status apollo::planning::LatticePlanner::Init |
( |
const PlanningConfig & |
config | ) |
|
|
inlineoverridevirtual |
◆ Name()
| std::string apollo::planning::LatticePlanner::Name |
( |
| ) |
|
|
inlineoverridevirtual |
◆ Plan()
| common::Status apollo::planning::LatticePlanner::Plan |
( |
const common::TrajectoryPoint & |
planning_init_point, |
|
|
Frame * |
frame, |
|
|
ADCTrajectory * |
ptr_computed_trajectory |
|
) |
| |
|
overridevirtual |
Override function Plan in parent class Planner.
- Parameters
-
| planning_init_point | The trajectory point where planning starts. |
| frame | Current planning frame. |
- Returns
- OK if planning succeeds; error otherwise.
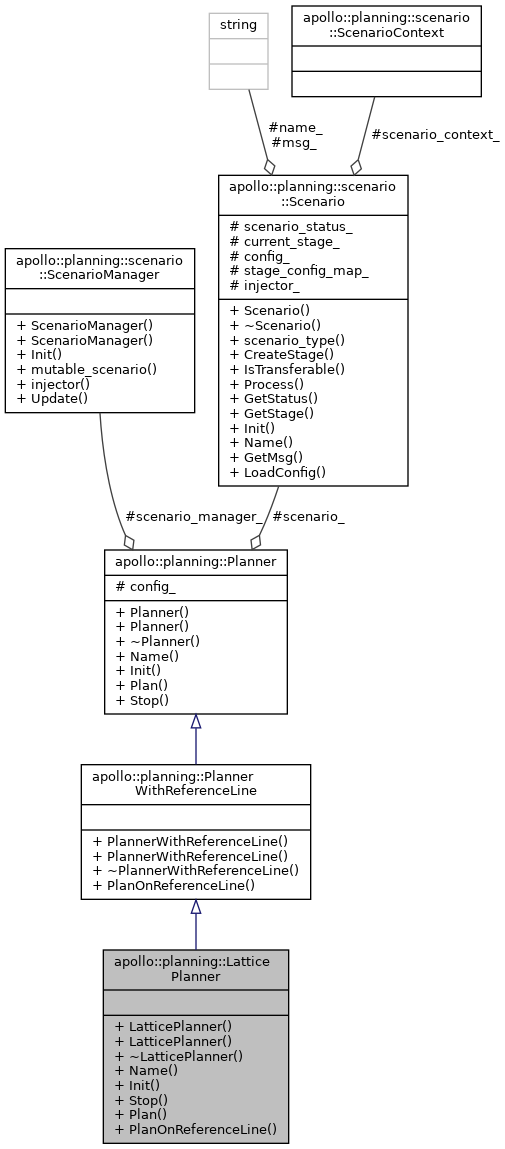
Implements apollo::planning::Planner.
◆ PlanOnReferenceLine()
| common::Status apollo::planning::LatticePlanner::PlanOnReferenceLine |
( |
const common::TrajectoryPoint & |
planning_init_point, |
|
|
Frame * |
frame, |
|
|
ReferenceLineInfo * |
reference_line_info |
|
) |
| |
|
overridevirtual |
Override function Plan in parent class Planner.
- Parameters
-
| planning_init_point | The trajectory point where planning starts. |
| frame | Current planning frame. |
| reference_line_info | The computed reference line. |
- Returns
- OK if planning succeeds; error otherwise.
Reimplemented from apollo::planning::PlannerWithReferenceLine.
◆ Stop()
| void apollo::planning::LatticePlanner::Stop |
( |
void |
| ) |
|
|
inlineoverridevirtual |
The documentation for this class was generated from the following file:
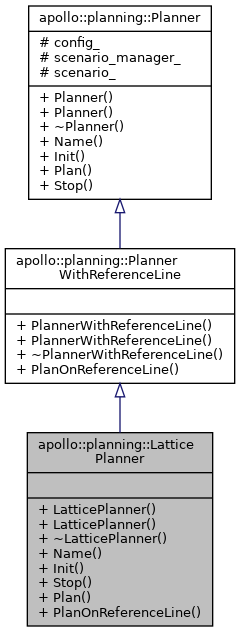
 Public Member Functions inherited from apollo::planning::PlannerWithReferenceLine
Public Member Functions inherited from apollo::planning::PlannerWithReferenceLine