#include <lane_change_decider.h>
|
| static bool | IsClearToChangeLane (ReferenceLineInfo *reference_line_info) |
| | A static function to check if the ChangeLanePath type of reference line is safe or if current reference line is safe to deviate away and come back. More...
|
| |
| static bool | IsPerceptionBlocked (const ReferenceLineInfo &reference_line_info, const double search_beam_length, const double search_beam_radius_intensity, const double search_range, const double is_block_angle_threshold) |
| | A static function to estimate if an obstacle in certain range in front of ADV blocks too much space perception behind itself by beam scanning. More...
|
| |
| static void | UpdatePreparationDistance (const bool is_opt_succeed, const Frame *frame, const ReferenceLineInfo *const reference_line_info, PlanningContext *planning_context) |
| |
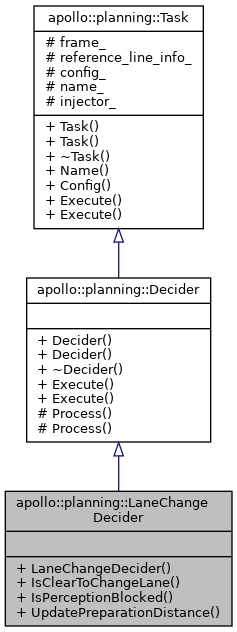
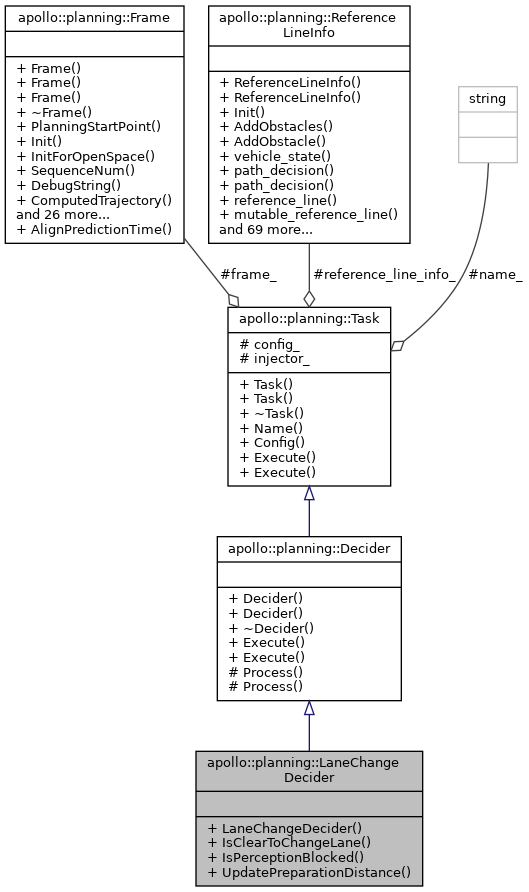
◆ LaneChangeDecider()
| apollo::planning::LaneChangeDecider::LaneChangeDecider |
( |
const TaskConfig & |
config, |
|
|
const std::shared_ptr< DependencyInjector > & |
injector |
|
) |
| |
◆ IsClearToChangeLane()
| static bool apollo::planning::LaneChangeDecider::IsClearToChangeLane |
( |
ReferenceLineInfo * |
reference_line_info | ) |
|
|
static |
A static function to check if the ChangeLanePath type of reference line is safe or if current reference line is safe to deviate away and come back.
◆ IsPerceptionBlocked()
| static bool apollo::planning::LaneChangeDecider::IsPerceptionBlocked |
( |
const ReferenceLineInfo & |
reference_line_info, |
|
|
const double |
search_beam_length, |
|
|
const double |
search_beam_radius_intensity, |
|
|
const double |
search_range, |
|
|
const double |
is_block_angle_threshold |
|
) |
| |
|
static |
A static function to estimate if an obstacle in certain range in front of ADV blocks too much space perception behind itself by beam scanning.
- Parameters
-
| search_beam_length | is the length of scanning beam |
| search_beam_radius_intensity | is the resolution of scanning |
| search_range | is the scanning range centering at ADV heading |
| is_block_angle_threshold | is the threshold to tell how big a block angle range is perception blocking |
◆ UpdatePreparationDistance()
| static void apollo::planning::LaneChangeDecider::UpdatePreparationDistance |
( |
const bool |
is_opt_succeed, |
|
|
const Frame * |
frame, |
|
|
const ReferenceLineInfo *const |
reference_line_info, |
|
|
PlanningContext * |
planning_context |
|
) |
| |
|
static |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::planning::Decider
Public Member Functions inherited from apollo::planning::Decider