#include <base_calibration_service.h>
◆ calibrator_method
| std::string apollo::perception::camera::CalibrationServiceInitOptions::calibrator_method = "" |
◆ calibrator_working_sensor_name
| std::string apollo::perception::camera::CalibrationServiceInitOptions::calibrator_working_sensor_name = "" |
◆ image_height
| int apollo::perception::camera::CalibrationServiceInitOptions::image_height = 0 |
◆ image_width
| int apollo::perception::camera::CalibrationServiceInitOptions::image_width = 0 |
◆ name_intrinsic_map
| std::map<std::string, Eigen::Matrix3f> apollo::perception::camera::CalibrationServiceInitOptions::name_intrinsic_map |
◆ timestamp
| double apollo::perception::camera::CalibrationServiceInitOptions::timestamp = 0 |
The documentation for this struct was generated from the following file:
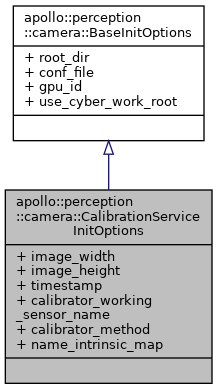
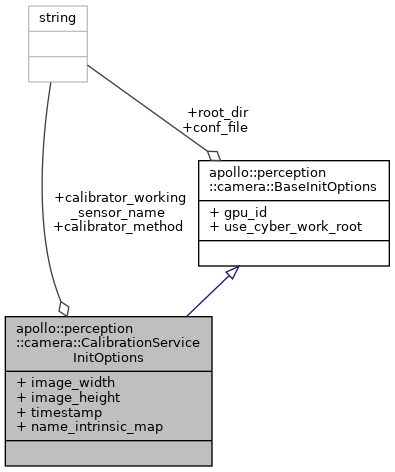
 Public Attributes inherited from apollo::perception::camera::BaseInitOptions
Public Attributes inherited from apollo::perception::camera::BaseInitOptions