|
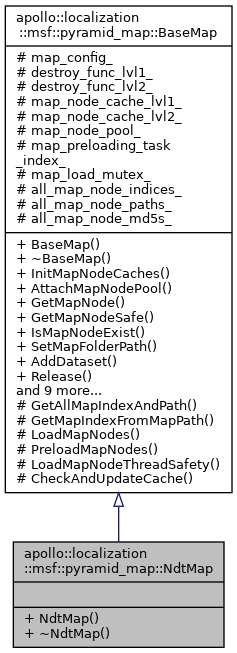
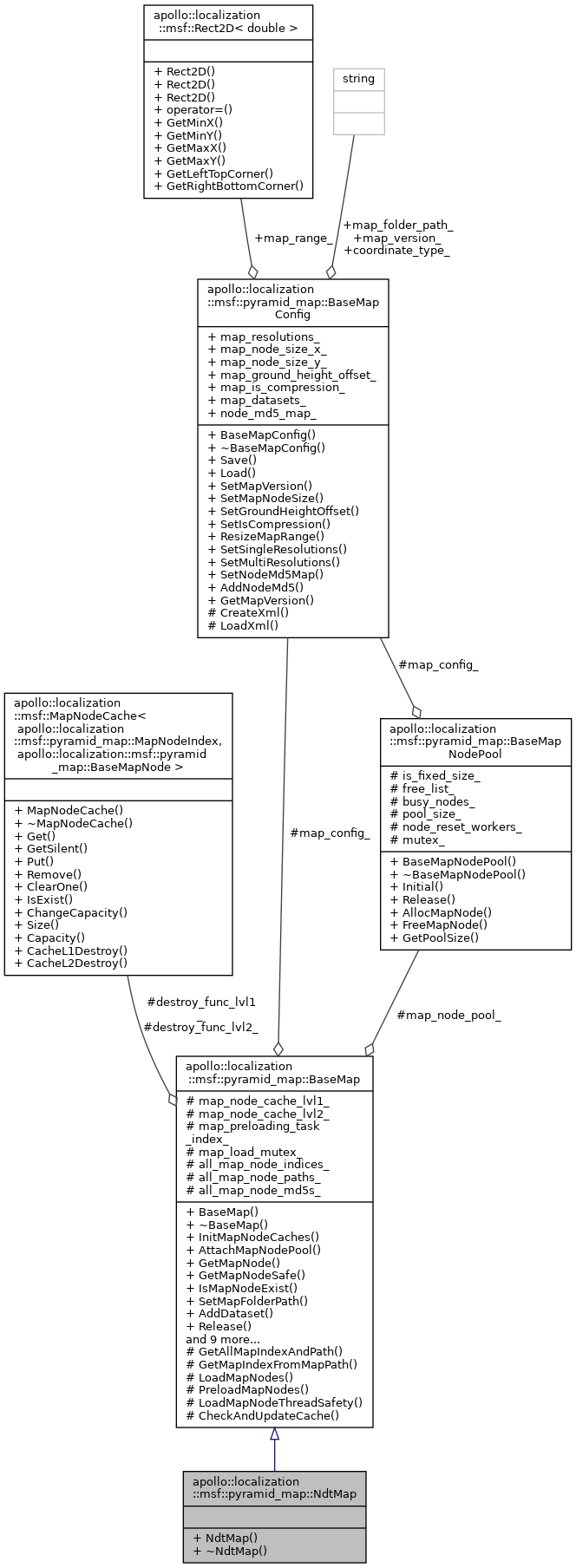
| | NdtMap (NdtMapConfig *config) |
| |
| | ~NdtMap () |
| |
| | BaseMap (BaseMapConfig *config) |
| | The constructor. More...
|
| |
| virtual | ~BaseMap () |
| | The destructor. More...
|
| |
| virtual void | InitMapNodeCaches (int cacheL1_size, int cahceL2_size) |
| |
| void | AttachMapNodePool (BaseMapNodePool *p_map_node_pool) |
| | Attach map node pointer. More...
|
| |
| BaseMapNode * | GetMapNode (const MapNodeIndex &index) |
| | Return the map node, if it's not in the cache, return false. More...
|
| |
| BaseMapNode * | GetMapNodeSafe (const MapNodeIndex &index) |
| | Return the map node, if it's not in the cache, safely load it. More...
|
| |
| bool | IsMapNodeExist (const MapNodeIndex &index) |
| | Check if the map node in the cache. More...
|
| |
| bool | SetMapFolderPath (const std::string folder_path) |
| | Set the directory of the map. More...
|
| |
| void | AddDataset (const std::string dataset_path) |
| | Add a dataset path to the map config. More...
|
| |
| void | Release () |
| | Release resources. More...
|
| |
| virtual void | PreloadMapArea (const Eigen::Vector3d &location, const Eigen::Vector3d &trans_diff, unsigned int resolution_id, unsigned int zone_id) |
| | Preload map nodes for the next frame location calculation. It will forecasts the nodes by the direction of the car moving. Because the progress of loading will cost a long time (over 100ms), it must do this for a period of time in advance. After the index of nodes calculate finished, it will create loading tasks, but will not wait for the loading finished, eigen version. More...
|
| |
| virtual bool | LoadMapArea (const Eigen::Vector3d &seed_pt3d, unsigned int resolution_id, unsigned int zone_id, int filter_size_x, int filter_size_y) |
| | Load map nodes for the location calculate of this frame. If the forecasts are correct in last frame, these nodes will be all in cache, if not, then need to create loading tasks, and wait for the loading finish, in order to the nodes which the following calculate needed are all in the memory, eigen version. More...
|
| |
| void | ComputeMd5ForAllMapNodes () |
| | Compute md5 for all map node file in map. More...
|
| |
| bool | CheckMap () |
| | Check if map is normal. More...
|
| |
| bool | CheckMapStrictly () |
| | Check if map is normal(with map node checking). More...
|
| |
| const BaseMapConfig & | GetMapConfig () const |
| | Get the map config. More...
|
| |
| BaseMapConfig & | GetMapConfig () |
| | Get the map config. More...
|
| |
| const std::vector< std::string > & | GetAllMapNodePaths () const |
| | Get all map node paths. More...
|
| |
| const std::vector< std::string > & | GetAllMapNodeMd5s () const |
| | Get all map node md5s. More...
|
| |
 Public Member Functions inherited from apollo::localization::msf::pyramid_map::BaseMap
Public Member Functions inherited from apollo::localization::msf::pyramid_map::BaseMap