The data structure of the map cells in a map node. More...
#include <base_map_matrix.h>
Public Member Functions | |
| BaseMapMatrix () | |
| The default constructor. More... | |
| virtual | ~BaseMapMatrix () |
| The deconstructor. More... | |
| BaseMapMatrix (const BaseMapMatrix &map_matrix) | |
| The copy constructor. More... | |
| virtual void | Init (const BaseMapConfig &config)=0 |
| Initialize the map matrix. More... | |
| virtual void | Reset ()=0 |
| Reset map cells data. More... | |
| virtual bool | GetIntensityImg (cv::Mat *intensity_img) const |
| get intensity image of node. More... | |
| virtual bool | GetAltitudeImg (cv::Mat *altitude_img) const |
| get altitude image of node. More... | |
Detailed Description
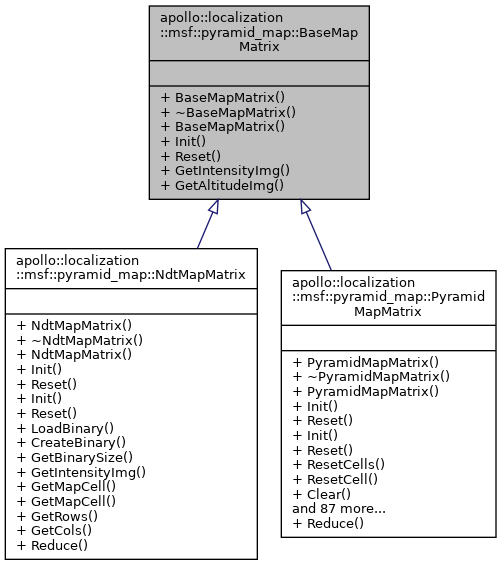
The data structure of the map cells in a map node.
Constructor & Destructor Documentation
◆ BaseMapMatrix() [1/2]
| apollo::localization::msf::pyramid_map::BaseMapMatrix::BaseMapMatrix | ( | ) |
The default constructor.
◆ ~BaseMapMatrix()
|
virtual |
The deconstructor.
◆ BaseMapMatrix() [2/2]
|
explicit |
The copy constructor.
Member Function Documentation
◆ GetAltitudeImg()
|
virtual |
get altitude image of node.
Reimplemented in apollo::localization::msf::pyramid_map::PyramidMapMatrix.
◆ GetIntensityImg()
|
virtual |
get intensity image of node.
Reimplemented in apollo::localization::msf::pyramid_map::NdtMapMatrix, and apollo::localization::msf::pyramid_map::PyramidMapMatrix.
◆ Init()
|
pure virtual |
Initialize the map matrix.
Implemented in apollo::localization::msf::pyramid_map::NdtMapMatrix, and apollo::localization::msf::pyramid_map::PyramidMapMatrix.
◆ Reset()
|
pure virtual |
Reset map cells data.
Implemented in apollo::localization::msf::pyramid_map::NdtMapMatrix, and apollo::localization::msf::pyramid_map::PyramidMapMatrix.
The documentation for this class was generated from the following file:
- modules/localization/msf/local_pyramid_map/base_map/base_map_matrix.h
