#include <client_alignment.h>
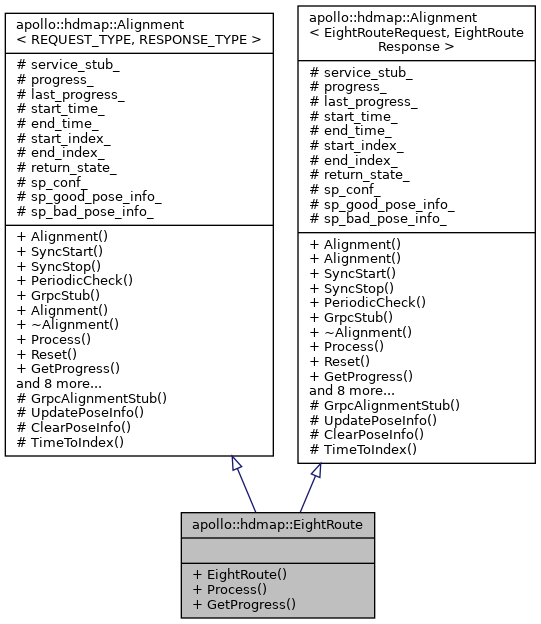
Inheritance diagram for apollo::hdmap::EightRoute:
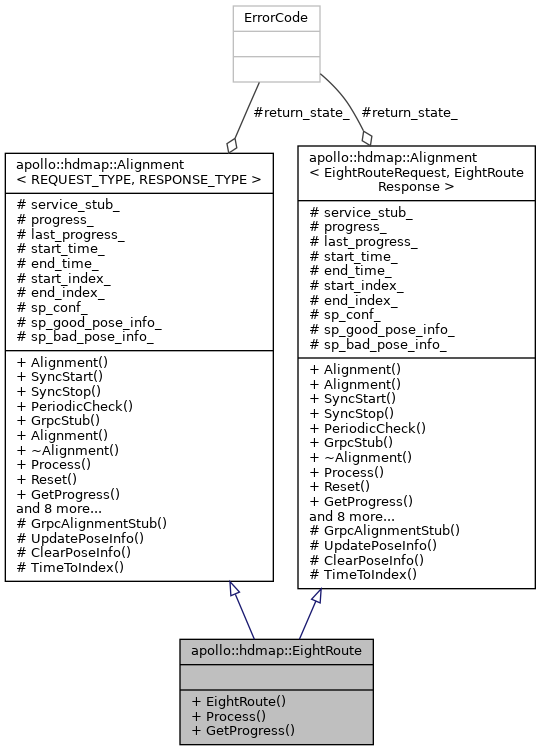
Collaboration diagram for apollo::hdmap::EightRoute:
Public Member Functions | |
| EightRoute (std::shared_ptr< JsonConf > sp_conf) | |
| ErrorCode | Process (const std::vector< FramePose > &poses) |
| double | GetProgress () const |
 Public Member Functions inherited from apollo::hdmap::Alignment< REQUEST_TYPE, RESPONSE_TYPE > Public Member Functions inherited from apollo::hdmap::Alignment< REQUEST_TYPE, RESPONSE_TYPE > | |
| Alignment () | |
| int | SyncStart () |
| int | SyncStop () |
| int | PeriodicCheck () |
| int | GrpcStub (REQUEST_TYPE *request, RESPONSE_TYPE *response) |
| Alignment (std::shared_ptr< JsonConf > sp_conf) | |
| virtual | ~Alignment () |
| virtual void | SetStartTime (double start_time) |
| virtual void | SetEndTime (double end_time) |
| virtual void | UpdateBadPoseInfo (const FramePose &pose) |
| virtual void | ClearBadPoseInfo () |
| virtual void | UpdateGoodPoseInfo (const FramePose &pose) |
| virtual void | ClearGoodPoseInfo () |
| virtual bool | IsGoodPose (const std::vector< FramePose > &poses, int pose_index) |
| ErrorCode | GetReturnState () const |
| Public Member Functions inherited from apollo::hdmap::Alignment< EightRouteRequest, EightRouteResponse > | |
| Alignment () | |
| Alignment (std::shared_ptr< JsonConf > sp_conf) | |
| int | SyncStart () |
| int | SyncStop () |
| int | PeriodicCheck () |
| int | GrpcStub (EightRouteRequest *request, EightRouteResponse *response) |
| virtual | ~Alignment () |
| virtual void | SetStartTime (double start_time) |
| virtual void | SetEndTime (double end_time) |
| virtual void | UpdateBadPoseInfo (const FramePose &pose) |
| virtual void | ClearBadPoseInfo () |
| virtual void | UpdateGoodPoseInfo (const FramePose &pose) |
| virtual void | ClearGoodPoseInfo () |
| virtual bool | IsGoodPose (const std::vector< FramePose > &poses, int pose_index) |
| ErrorCode | GetReturnState () const |
Additional Inherited Members | |
| Protected Member Functions inherited from apollo::hdmap::Alignment< REQUEST_TYPE, RESPONSE_TYPE > | |
| void | UpdatePoseInfo (const FramePose &pose, std::shared_ptr< BadOrGoodPoseInfo > sp_pose_info) |
| void | ClearPoseInfo (std::shared_ptr< BadOrGoodPoseInfo > sp_pose_info) |
| int | TimeToIndex (const std::vector< FramePose > &poses, double time) |
| Protected Member Functions inherited from apollo::hdmap::Alignment< EightRouteRequest, EightRouteResponse > | |
| void | UpdatePoseInfo (const FramePose &pose, std::shared_ptr< BadOrGoodPoseInfo > sp_pose_info) |
| void | ClearPoseInfo (std::shared_ptr< BadOrGoodPoseInfo > sp_pose_info) |
| int | TimeToIndex (const std::vector< FramePose > &poses, double time) |
| Protected Attributes inherited from apollo::hdmap::Alignment< REQUEST_TYPE, RESPONSE_TYPE > | |
| std::unique_ptr< CollectionCheckerService::Stub > | service_stub_ |
| double | progress_ |
| double | last_progress_ |
| double | start_time_ |
| double | end_time_ |
| int | start_index_ |
| double | end_index_ |
| ErrorCode | return_state_ |
| std::shared_ptr< JsonConf > | sp_conf_ = nullptr |
| std::shared_ptr< BadOrGoodPoseInfo > | sp_good_pose_info_ = nullptr |
| std::shared_ptr< BadOrGoodPoseInfo > | sp_bad_pose_info_ = nullptr |
| Protected Attributes inherited from apollo::hdmap::Alignment< EightRouteRequest, EightRouteResponse > | |
| std::unique_ptr< CollectionCheckerService::Stub > | service_stub_ |
| double | progress_ |
| double | last_progress_ |
| double | start_time_ |
| double | end_time_ |
| int | start_index_ |
| double | end_index_ |
| ErrorCode | return_state_ |
| std::shared_ptr< JsonConf > | sp_conf_ |
| std::shared_ptr< BadOrGoodPoseInfo > | sp_good_pose_info_ |
| std::shared_ptr< BadOrGoodPoseInfo > | sp_bad_pose_info_ |
Constructor & Destructor Documentation
◆ EightRoute()
|
explicit |
Member Function Documentation
◆ GetProgress()
|
virtual |
Reimplemented from apollo::hdmap::Alignment< REQUEST_TYPE, RESPONSE_TYPE >.
◆ Process()
|
virtual |
The documentation for this class was generated from the following files:
- modules/map/tools/map_datachecker/client/client_alignment.h
- modules/map/tools/map_datachecker/server/eight_route.h
