#include <velodyne_parser.h>
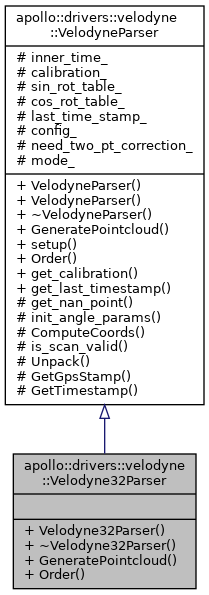
Inheritance diagram for apollo::drivers::velodyne::Velodyne32Parser:
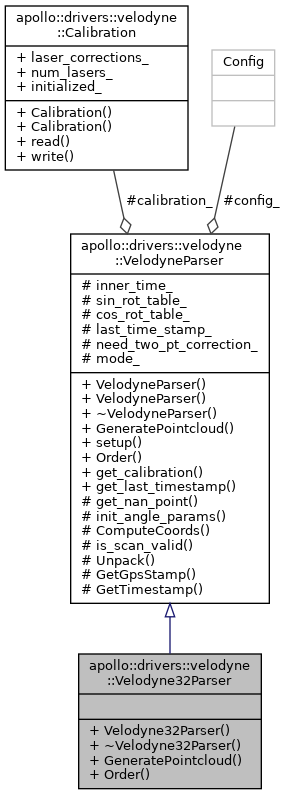
Collaboration diagram for apollo::drivers::velodyne::Velodyne32Parser:
Public Member Functions | |
| Velodyne32Parser (const Config &config) | |
| ~Velodyne32Parser () | |
| void | GeneratePointcloud (const std::shared_ptr< VelodyneScan > &scan_msg, std::shared_ptr< PointCloud > out_msg) |
| Set up for data processing. More... | |
| void | Order (std::shared_ptr< PointCloud > cloud) |
 Public Member Functions inherited from apollo::drivers::velodyne::VelodyneParser Public Member Functions inherited from apollo::drivers::velodyne::VelodyneParser | |
| VelodyneParser () | |
| VelodyneParser (const Config &config) | |
| virtual | ~VelodyneParser () |
| virtual void | setup () |
| const Calibration & | get_calibration () |
| const double | get_last_timestamp () |
Additional Inherited Members | |
| Protected Member Functions inherited from apollo::drivers::velodyne::VelodyneParser | |
| PointXYZIT | get_nan_point (uint64_t timestamp) |
| void | init_angle_params (double view_direction, double view_width) |
| void | ComputeCoords (const float &raw_distance, const LaserCorrection &corrections, const uint16_t rotation, PointXYZIT *point) |
| Compute coords with the data in block. More... | |
| bool | is_scan_valid (int rotation, float distance) |
| uint64_t | GetGpsStamp (double current_stamp, double *previous_stamp, uint64_t *gps_base_usec) |
| Protected Attributes inherited from apollo::drivers::velodyne::VelodyneParser | |
| const float(* | inner_time_ )[12][32] |
| Calibration | calibration_ |
| float | sin_rot_table_ [ROTATION_MAX_UNITS] |
| float | cos_rot_table_ [ROTATION_MAX_UNITS] |
| double | last_time_stamp_ |
| Config | config_ |
| bool | need_two_pt_correction_ |
| Mode | mode_ |
Constructor & Destructor Documentation
◆ Velodyne32Parser()
|
explicit |
◆ ~Velodyne32Parser()
|
inline |
Member Function Documentation
◆ GeneratePointcloud()
|
virtual |
Set up for data processing.
Perform initializations needed before data processing can begin:
- read device-specific angles calibration
- Parameters
-
private_nh private node handle for ROS parameters
- Returns
- 0 if successful; errno value for failure
Implements apollo::drivers::velodyne::VelodyneParser.
◆ Order()
|
virtual |
Implements apollo::drivers::velodyne::VelodyneParser.
The documentation for this class was generated from the following file:
- modules/drivers/lidar/velodyne/parser/velodyne_parser.h
