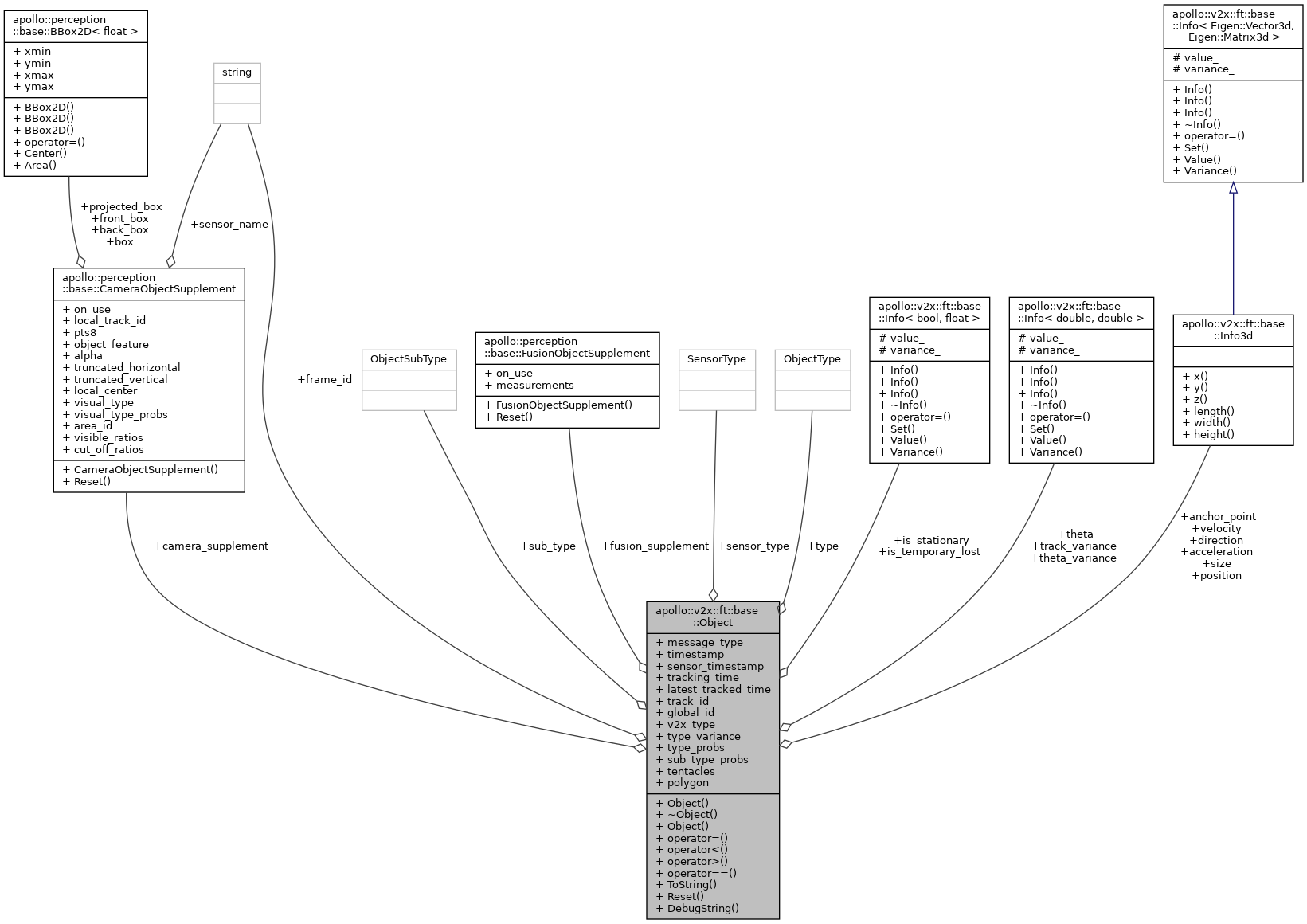
#include <v2x_object.h>
◆ Info2d
◆ Info2f
◆ Infob
◆ Infod
◆ Infof
◆ Point2f
◆ Point3f
◆ Object() [1/2]
| apollo::v2x::ft::base::Object::Object |
( |
| ) |
|
|
inline |
◆ ~Object()
| apollo::v2x::ft::base::Object::~Object |
( |
| ) |
|
|
default |
◆ Object() [2/2]
| apollo::v2x::ft::base::Object::Object |
( |
const Object & |
| ) |
|
|
default |
◆ DebugString()
| std::string apollo::v2x::ft::base::Object::DebugString |
( |
| ) |
const |
|
inline |
◆ operator<()
| bool apollo::v2x::ft::base::Object::operator< |
( |
const Object & |
rhs | ) |
const |
|
inline |
◆ operator=()
| Object& apollo::v2x::ft::base::Object::operator= |
( |
const Object & |
| ) |
|
|
default |
◆ operator==()
| bool apollo::v2x::ft::base::Object::operator== |
( |
const Object & |
rhs | ) |
const |
|
inline |
◆ operator>()
| bool apollo::v2x::ft::base::Object::operator> |
( |
const Object & |
rhs | ) |
const |
|
inline |
◆ Reset()
| void apollo::v2x::ft::base::Object::Reset |
( |
| ) |
|
◆ ToString()
| std::string apollo::v2x::ft::base::Object::ToString |
( |
| ) |
const |
◆ acceleration
| Info3d apollo::v2x::ft::base::Object::acceleration |
◆ anchor_point
| Info3d apollo::v2x::ft::base::Object::anchor_point |
◆ camera_supplement
◆ direction
| Info3d apollo::v2x::ft::base::Object::direction |
◆ frame_id
| std::string apollo::v2x::ft::base::Object::frame_id = "" |
◆ fusion_supplement
◆ global_id
| int apollo::v2x::ft::base::Object::global_id = -1 |
◆ is_stationary
| Infob apollo::v2x::ft::base::Object::is_stationary |
◆ is_temporary_lost
| Infob apollo::v2x::ft::base::Object::is_temporary_lost |
◆ latest_tracked_time
| double apollo::v2x::ft::base::Object::latest_tracked_time = 0.0 |
◆ message_type
◆ polygon
| std::vector<Info3d> apollo::v2x::ft::base::Object::polygon |
◆ position
| Info3d apollo::v2x::ft::base::Object::position |
◆ sensor_timestamp
| double apollo::v2x::ft::base::Object::sensor_timestamp = 0.0 |
◆ sensor_type
| SensorType apollo::v2x::ft::base::Object::sensor_type = SensorType::UNKNOWN_SENSOR_TYPE |
◆ size
| Info3d apollo::v2x::ft::base::Object::size |
◆ sub_type
◆ sub_type_probs
| std::vector<float> apollo::v2x::ft::base::Object::sub_type_probs |
◆ tentacles
| std::vector<std::vector<Info3d> > apollo::v2x::ft::base::Object::tentacles |
◆ theta
| Infod apollo::v2x::ft::base::Object::theta |
◆ theta_variance
| Infod apollo::v2x::ft::base::Object::theta_variance |
◆ timestamp
| double apollo::v2x::ft::base::Object::timestamp = 0.0 |
◆ track_id
| int apollo::v2x::ft::base::Object::track_id = -1 |
◆ track_variance
| Infod apollo::v2x::ft::base::Object::track_variance |
◆ tracking_time
| double apollo::v2x::ft::base::Object::tracking_time = 0.0 |
◆ type
◆ type_probs
| std::vector<float> apollo::v2x::ft::base::Object::type_probs |
◆ type_variance
| double apollo::v2x::ft::base::Object::type_variance = 1.0 |
◆ v2x_type
◆ velocity
| Info3d apollo::v2x::ft::base::Object::velocity |
The documentation for this struct was generated from the following file: