#include <memory>#include <string>#include <utility>#include <vector>#include "modules/common/math/aabox2d.h"#include "modules/common/math/aaboxkdtree2d.h"#include "modules/common/math/math_utils.h"#include "modules/common/math/polygon2d.h"#include "modules/common/math/vec2d.h"#include "modules/map/proto/map_clear_area.pb.h"#include "modules/map/proto/map_crosswalk.pb.h"#include "modules/map/proto/map_id.pb.h"#include "modules/map/proto/map_junction.pb.h"#include "modules/map/proto/map_lane.pb.h"#include "modules/map/proto/map_overlap.pb.h"#include "modules/map/proto/map_parking_space.pb.h"#include "modules/map/proto/map_pnc_junction.pb.h"#include "modules/map/proto/map_road.pb.h"#include "modules/map/proto/map_signal.pb.h"#include "modules/map/proto/map_speed_bump.pb.h"#include "modules/map/proto/map_stop_sign.pb.h"#include "modules/map/proto/map_yield_sign.pb.h"#include "modules/map/proto/map_rsu.pb.h"
Include dependency graph for hdmap_common.h:

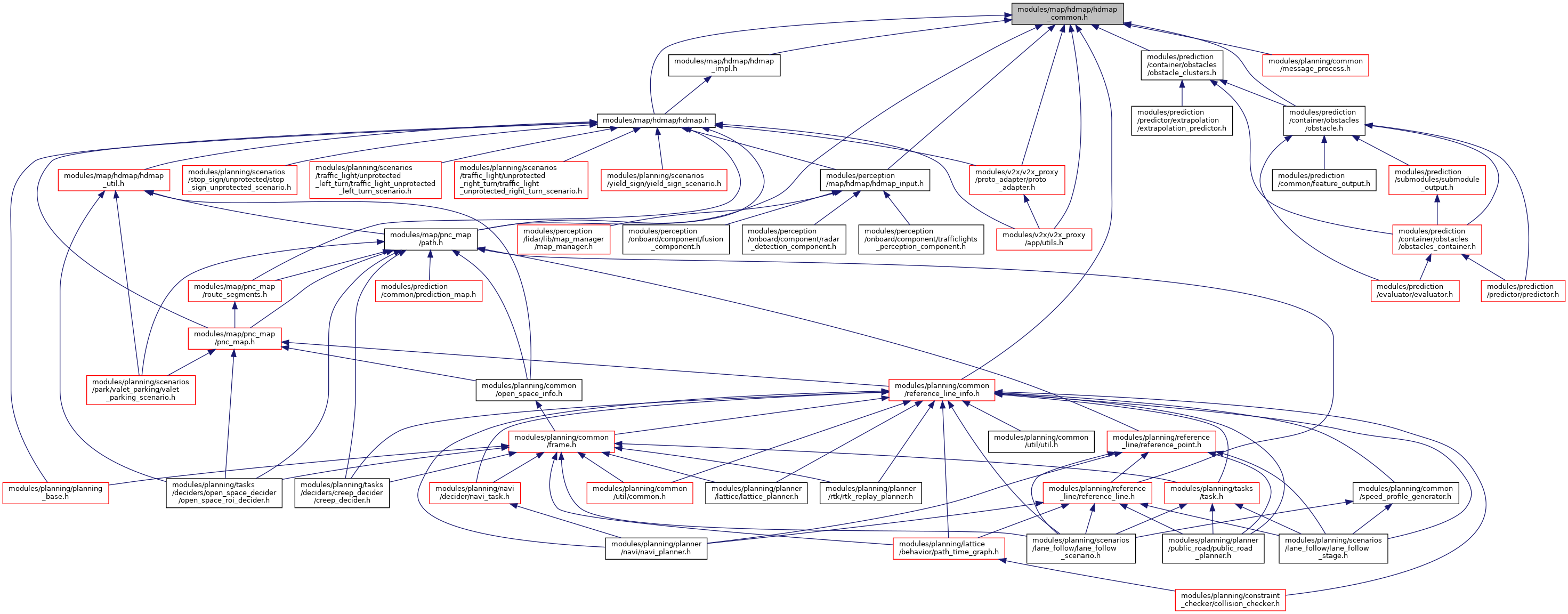
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::hdmap::ObjectWithAABox< Object, GeoObject > |
| struct | apollo::hdmap::LineBoundary |
| struct | apollo::hdmap::PolygonBoundary |
| struct | apollo::hdmap::RoiAttribute |
| struct | apollo::hdmap::PolygonRoi |
| struct | apollo::hdmap::RoadRoi |
| class | apollo::hdmap::LaneInfo |
| class | apollo::hdmap::JunctionInfo |
| class | apollo::hdmap::SignalInfo |
| class | apollo::hdmap::CrosswalkInfo |
| class | apollo::hdmap::StopSignInfo |
| class | apollo::hdmap::YieldSignInfo |
| class | apollo::hdmap::ClearAreaInfo |
| class | apollo::hdmap::SpeedBumpInfo |
| class | apollo::hdmap::OverlapInfo |
| class | apollo::hdmap::RoadInfo |
| class | apollo::hdmap::ParkingSpaceInfo |
| class | apollo::hdmap::PNCJunctionInfo |
| struct | apollo::hdmap::JunctionBoundary |
| class | apollo::hdmap::RSUInfo |
Namespaces | |
| apollo::hdmap | |
| apollo::hdmap | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
