#include <single_lane_predictor.h>
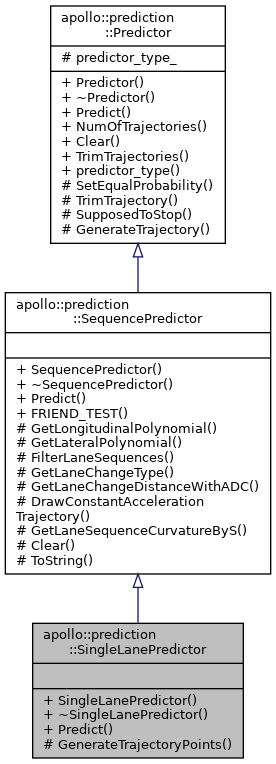
Inheritance diagram for apollo::prediction::SingleLanePredictor:

Collaboration diagram for apollo::prediction::SingleLanePredictor:
Public Member Functions | |
| SingleLanePredictor () | |
| Constructor. More... | |
| virtual | ~SingleLanePredictor ()=default |
| Destructor. More... | |
| bool | Predict (const ADCTrajectoryContainer *adc_trajectory_container, Obstacle *obstacle, ObstaclesContainer *obstacles_container) override |
| Make prediction. More... | |
 Public Member Functions inherited from apollo::prediction::SequencePredictor Public Member Functions inherited from apollo::prediction::SequencePredictor | |
| SequencePredictor ()=default | |
| Constructor. More... | |
| virtual | ~SequencePredictor ()=default |
| Destructor. More... | |
| FRIEND_TEST (SequencePredictorTest, General) | |
| Public Member Functions inherited from apollo::prediction::Predictor | |
| Predictor ()=default | |
| Constructor. More... | |
| virtual | ~Predictor ()=default |
| Destructor. More... | |
| int | NumOfTrajectories (const Obstacle &obstacle) |
| Get trajectory size. More... | |
| void | TrimTrajectories (const ADCTrajectoryContainer &adc_trajectory_container, Obstacle *obstacle) |
| Trim prediction trajectories by adc trajectory. More... | |
| const ObstacleConf::PredictorType & | predictor_type () |
| get the predictor type More... | |
Protected Member Functions | |
| void | GenerateTrajectoryPoints (const Obstacle &obstacle, const LaneSequence &lane_sequence, const double total_time, const double period, std::vector< apollo::common::TrajectoryPoint > *points) |
| Draw lane sequence trajectory points. More... | |
| Protected Member Functions inherited from apollo::prediction::SequencePredictor | |
| bool | GetLongitudinalPolynomial (const Obstacle &obstacle, const LaneSequence &lane_sequence, const std::pair< double, double > &lon_end_state, std::array< double, 5 > *coefficients) |
| bool | GetLateralPolynomial (const Obstacle &obstacle, const LaneSequence &lane_sequence, const double time_to_end_state, std::array< double, 4 > *coefficients) |
| void | FilterLaneSequences (const Feature &feature, const std::string &lane_id, const Obstacle *ego_vehicle_ptr, const ADCTrajectoryContainer *adc_trajectory_container, std::vector< bool > *enable_lane_sequence) |
| Filter lane sequences. More... | |
| LaneChangeType | GetLaneChangeType (const std::string &lane_id, const LaneSequence &lane_sequence) |
| Get lane change type. More... | |
| double | GetLaneChangeDistanceWithADC (const LaneSequence &lane_sequence, const Obstacle *ego_vehicle_ptr, const ADCTrajectoryContainer *adc_trajectory_container) |
| Get lane change distance with ADC. More... | |
| void | DrawConstantAccelerationTrajectory (const Obstacle &obstacle, const LaneSequence &lane_sequence, const double total_time, const double period, const double acceleration, std::vector< apollo::common::TrajectoryPoint > *points) |
| Draw constant acceleration trajectory points. More... | |
| double | GetLaneSequenceCurvatureByS (const LaneSequence &lane_sequence, const double s) |
| Get lane sequence curvature by s. More... | |
| void | Clear () |
| Clear private members. More... | |
| std::string | ToString (const LaneSequence &sequence) |
| Convert a lane sequence to string. More... | |
| Protected Member Functions inherited from apollo::prediction::Predictor | |
| void | SetEqualProbability (const double probability, const int start_index, Obstacle *obstacle_ptr) |
| Set equal probability to prediction trajectories. More... | |
| bool | TrimTrajectory (const ADCTrajectoryContainer &adc_trajectory_container, Obstacle *obstacle, Trajectory *trajectory) |
| Trim a single prediction trajectory, keep the portion that is not in junction. More... | |
| bool | SupposedToStop (const Feature &feature, const double stop_distance, double *acceleration) |
| Determine if an obstacle is supposed to stop within a distance. More... | |
Additional Inherited Members | |
| Public Types inherited from apollo::prediction::SequencePredictor | |
| enum | LaneChangeType { LaneChangeType::LEFT, LaneChangeType::RIGHT, LaneChangeType::STRAIGHT, LaneChangeType::ONTO_LANE, LaneChangeType::INVALID } |
| Static Protected Member Functions inherited from apollo::prediction::Predictor | |
| static Trajectory | GenerateTrajectory (const std::vector< apollo::common::TrajectoryPoint > &points) |
| Generate trajectory from trajectory points. More... | |
| Protected Attributes inherited from apollo::prediction::Predictor | |
| ObstacleConf::PredictorType | predictor_type_ |
Constructor & Destructor Documentation
◆ SingleLanePredictor()
| apollo::prediction::SingleLanePredictor::SingleLanePredictor | ( | ) |
Constructor.
◆ ~SingleLanePredictor()
|
virtualdefault |
Destructor.
Member Function Documentation
◆ GenerateTrajectoryPoints()
|
protected |
Draw lane sequence trajectory points.
- Parameters
-
Obstacle Lane sequence Total prediction time Prediction period A vector of generated trajectory points
◆ Predict()
|
overridevirtual |
Make prediction.
- Parameters
-
ADC trajectory container Obstacle pointer Obstacles container
- Returns
- If predicted successfully
Reimplemented from apollo::prediction::SequencePredictor.
The documentation for this class was generated from the following file:
- modules/prediction/predictor/single_lane/single_lane_predictor.h
