#include <planning_test_base.h>
◆ ~PlanningTestBase()
| virtual apollo::planning::PlanningTestBase::~PlanningTestBase |
( |
| ) |
|
|
virtualdefault |
◆ FeedTestData()
| bool apollo::planning::PlanningTestBase::FeedTestData |
( |
| ) |
|
|
protected |
◆ GetTrafficRuleConfig()
| TrafficRuleConfig* apollo::planning::PlanningTestBase::GetTrafficRuleConfig |
( |
const TrafficRuleConfig::RuleId & |
rule_id | ) |
|
◆ IsValidTrajectory()
| bool apollo::planning::PlanningTestBase::IsValidTrajectory |
( |
const ADCTrajectory & |
trajectory | ) |
|
|
protected |
◆ RunPlanning()
| bool apollo::planning::PlanningTestBase::RunPlanning |
( |
const std::string & |
test_case_name, |
|
|
int |
case_num, |
|
|
bool |
no_trajectory_point |
|
) |
| |
Execute the planning code.
- Returns
- true if planning is success. The ADCTrajectory will be used to store the planing results. Otherwise false.
◆ SetUp()
| virtual void apollo::planning::PlanningTestBase::SetUp |
( |
| ) |
|
|
virtual |
◆ SetUpTestCase()
| static void apollo::planning::PlanningTestBase::SetUpTestCase |
( |
| ) |
|
|
static |
◆ TrimPlanning()
| void apollo::planning::PlanningTestBase::TrimPlanning |
( |
ADCTrajectory * |
origin, |
|
|
bool |
no_trajectory_point |
|
) |
| |
|
protected |
◆ UpdateData()
| void apollo::planning::PlanningTestBase::UpdateData |
( |
| ) |
|
◆ adc_trajectory_
| ADCTrajectory apollo::planning::PlanningTestBase::adc_trajectory_ |
|
protected |
◆ config_
| PlanningConfig apollo::planning::PlanningTestBase::config_ |
|
protected |
◆ injector_
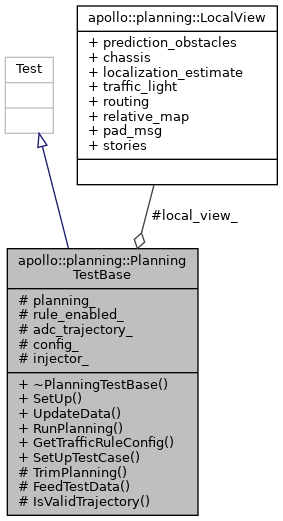
◆ local_view_
| LocalView apollo::planning::PlanningTestBase::local_view_ |
|
protected |
◆ planning_
| std::unique_ptr<PlanningBase> apollo::planning::PlanningTestBase::planning_ = nullptr |
|
protected |
◆ rule_enabled_
| std::map<TrafficRuleConfig::RuleId, bool> apollo::planning::PlanningTestBase::rule_enabled_ |
|
protected |
The documentation for this class was generated from the following file: