#include <osqp_spline_2d_solver.h>
Inheritance diagram for apollo::planning::OsqpSpline2dSolver:
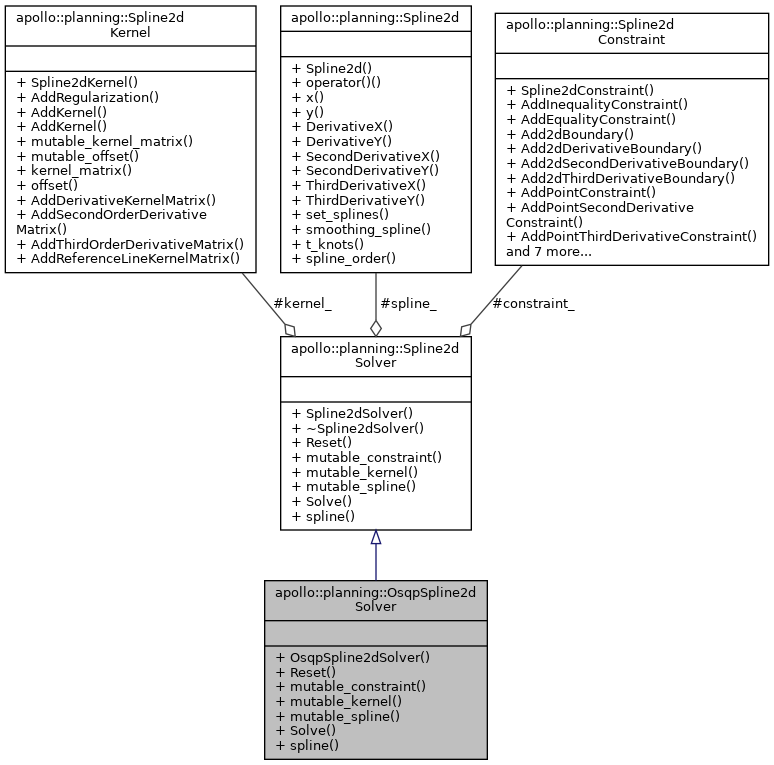
Collaboration diagram for apollo::planning::OsqpSpline2dSolver:
Public Member Functions | |
| OsqpSpline2dSolver (const std::vector< double > &t_knots, const uint32_t order) | |
| void | Reset (const std::vector< double > &t_knots, const uint32_t order) override |
| Spline2dConstraint * | mutable_constraint () override |
| Spline2dKernel * | mutable_kernel () override |
| Spline2d * | mutable_spline () override |
| bool | Solve () override |
| const Spline2d & | spline () const override |
 Public Member Functions inherited from apollo::planning::Spline2dSolver Public Member Functions inherited from apollo::planning::Spline2dSolver | |
| Spline2dSolver (const std::vector< double > &t_knots, const uint32_t order) | |
| virtual | ~Spline2dSolver ()=default |
Additional Inherited Members | |
| Protected Attributes inherited from apollo::planning::Spline2dSolver | |
| Spline2d | spline_ |
| Spline2dKernel | kernel_ |
| Spline2dConstraint | constraint_ |
Constructor & Destructor Documentation
◆ OsqpSpline2dSolver()
| apollo::planning::OsqpSpline2dSolver::OsqpSpline2dSolver | ( | const std::vector< double > & | t_knots, |
| const uint32_t | order | ||
| ) |
Member Function Documentation
◆ mutable_constraint()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
◆ mutable_kernel()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
◆ mutable_spline()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
◆ Reset()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
◆ Solve()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
◆ spline()
|
overridevirtual |
Implements apollo::planning::Spline2dSolver.
The documentation for this class was generated from the following file:
- modules/planning/math/smoothing_spline/osqp_spline_2d_solver.h
