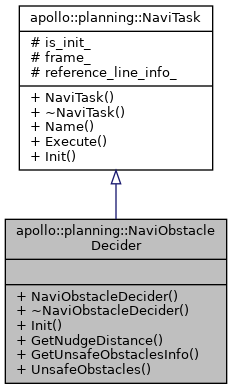
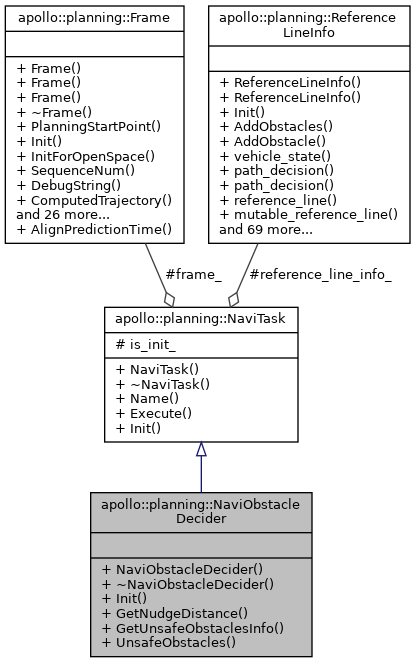
NaviObstacleDecider is used to make appropriate decisions for obstacles around the vehicle in navigation mode. Note that NaviObstacleDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
More...
#include <navi_obstacle_decider.h>
NaviObstacleDecider is used to make appropriate decisions for obstacles around the vehicle in navigation mode. Note that NaviObstacleDecider is only used in navigation mode (turn on navigation mode by setting "FLAGS_use_navigation_mode" to "true") and do not use it in standard mode.
◆ NaviObstacleDecider()
| apollo::planning::NaviObstacleDecider::NaviObstacleDecider |
( |
| ) |
|
◆ ~NaviObstacleDecider()
| virtual apollo::planning::NaviObstacleDecider::~NaviObstacleDecider |
( |
| ) |
|
|
virtualdefault |
◆ GetNudgeDistance()
| double apollo::planning::NaviObstacleDecider::GetNudgeDistance |
( |
const std::vector< const Obstacle *> & |
obstacles, |
|
|
const ReferenceLine & |
reference_line, |
|
|
const PathDecision & |
path_decision, |
|
|
const std::vector< common::PathPoint > & |
path_data_points, |
|
|
const common::VehicleState & |
vehicle_state, |
|
|
int * |
lane_obstacles_num |
|
) |
| |
get the actual nudgable distance according to the position of the obstacle
- Returns
- actual nudgable distance
◆ GetUnsafeObstaclesInfo()
| void apollo::planning::NaviObstacleDecider::GetUnsafeObstaclesInfo |
( |
const std::vector< common::PathPoint > & |
path_data_points, |
|
|
const std::vector< const Obstacle *> & |
obstacles |
|
) |
| |
get the unsafe obstacles between trajectory and reference line.
◆ Init()
| bool apollo::planning::NaviObstacleDecider::Init |
( |
const PlanningConfig & |
config | ) |
|
|
overridevirtual |
◆ UnsafeObstacles()
| const std::vector< std::tuple< std::string, double, double > > & apollo::planning::NaviObstacleDecider::UnsafeObstacles |
( |
| ) |
|
|
inline |
Get unsafe obstacles' ID.
- Returns
- unsafe_obstacle_ID_
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::planning::NaviTask
Public Member Functions inherited from apollo::planning::NaviTask