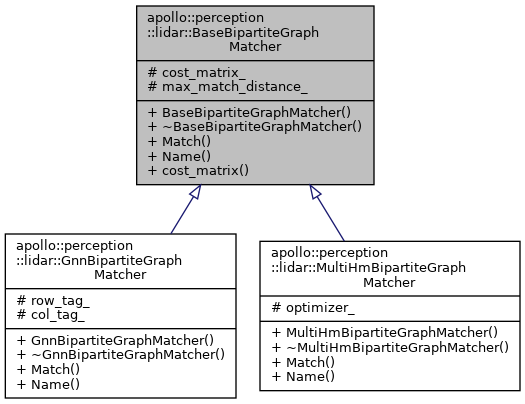
#include <base_bipartite_graph_matcher.h>
◆ NodeNodePair
◆ BaseBipartiteGraphMatcher()
| apollo::perception::lidar::BaseBipartiteGraphMatcher::BaseBipartiteGraphMatcher |
( |
| ) |
|
|
default |
◆ ~BaseBipartiteGraphMatcher()
| virtual apollo::perception::lidar::BaseBipartiteGraphMatcher::~BaseBipartiteGraphMatcher |
( |
| ) |
|
|
virtualdefault |
◆ cost_matrix()
| virtual common::SecureMat<float>* apollo::perception::lidar::BaseBipartiteGraphMatcher::cost_matrix |
( |
| ) |
|
|
inlinevirtual |
◆ Match()
| virtual void apollo::perception::lidar::BaseBipartiteGraphMatcher::Match |
( |
const BipartiteGraphMatcherOptions & |
options, |
|
|
std::vector< NodeNodePair > * |
assignments, |
|
|
std::vector< size_t > * |
unassigned_rows, |
|
|
std::vector< size_t > * |
unassigned_cols |
|
) |
| |
|
pure virtual |
◆ Name()
| virtual std::string apollo::perception::lidar::BaseBipartiteGraphMatcher::Name |
( |
| ) |
const |
|
pure virtual |
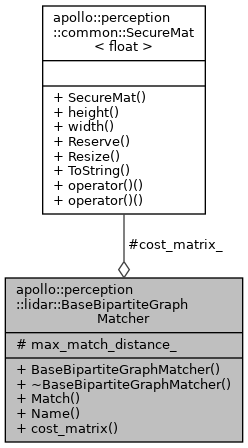
◆ cost_matrix_
| common::SecureMat<float>* apollo::perception::lidar::BaseBipartiteGraphMatcher::cost_matrix_ = nullptr |
|
protected |
◆ max_match_distance_
| float apollo::perception::lidar::BaseBipartiteGraphMatcher::max_match_distance_ = 0.0f |
|
protected |
The documentation for this class was generated from the following file: