#include <detection.h>
◆ TrafficLightDetection() [1/2]
| apollo::perception::camera::TrafficLightDetection::TrafficLightDetection |
( |
| ) |
|
|
inline |
◆ ~TrafficLightDetection()
| apollo::perception::camera::TrafficLightDetection::~TrafficLightDetection |
( |
| ) |
|
|
inline |
◆ TrafficLightDetection() [2/2]
| apollo::perception::camera::TrafficLightDetection::TrafficLightDetection |
( |
const TrafficLightDetection & |
| ) |
|
|
delete |
◆ ApplyNMS()
| void apollo::perception::camera::TrafficLightDetection::ApplyNMS |
( |
std::vector< base::TrafficLightPtr > * |
lights, |
|
|
double |
iou_thresh = 0.6 |
|
) |
| |
◆ Detect()
◆ getDetectedBoxes()
| const std::vector<base::TrafficLightPtr>& apollo::perception::camera::TrafficLightDetection::getDetectedBoxes |
( |
| ) |
|
|
inline |
◆ Inference()
◆ Init()
◆ Name()
| std::string apollo::perception::camera::TrafficLightDetection::Name |
( |
| ) |
const |
|
overridevirtual |
◆ operator=()
◆ SelectOutputBoxes()
| bool apollo::perception::camera::TrafficLightDetection::SelectOutputBoxes |
( |
const std::vector< base::RectI > & |
crop_box_list, |
|
|
const std::vector< float > & |
resize_scale_list_col, |
|
|
const std::vector< float > & |
resize_scale_list_row, |
|
|
std::vector< base::TrafficLightPtr > * |
lights |
|
) |
| |
The documentation for this class was generated from the following file:
- modules/perception/camera/lib/traffic_light/detector/detection/detection.h
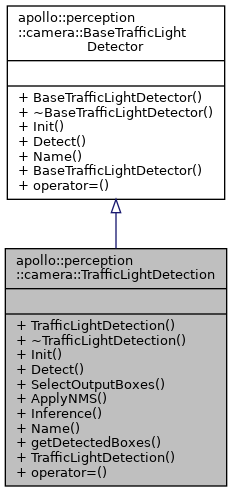
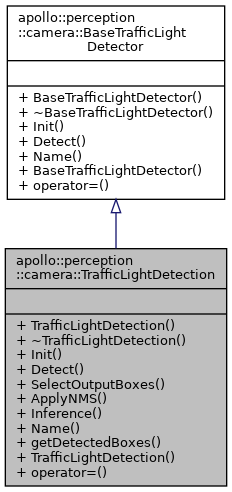
 Public Member Functions inherited from apollo::perception::camera::BaseTrafficLightDetector
Public Member Functions inherited from apollo::perception::camera::BaseTrafficLightDetector