#include <lossy_map_node_2d.h>
Inheritance diagram for apollo::localization::msf::LossyMapNode2D:
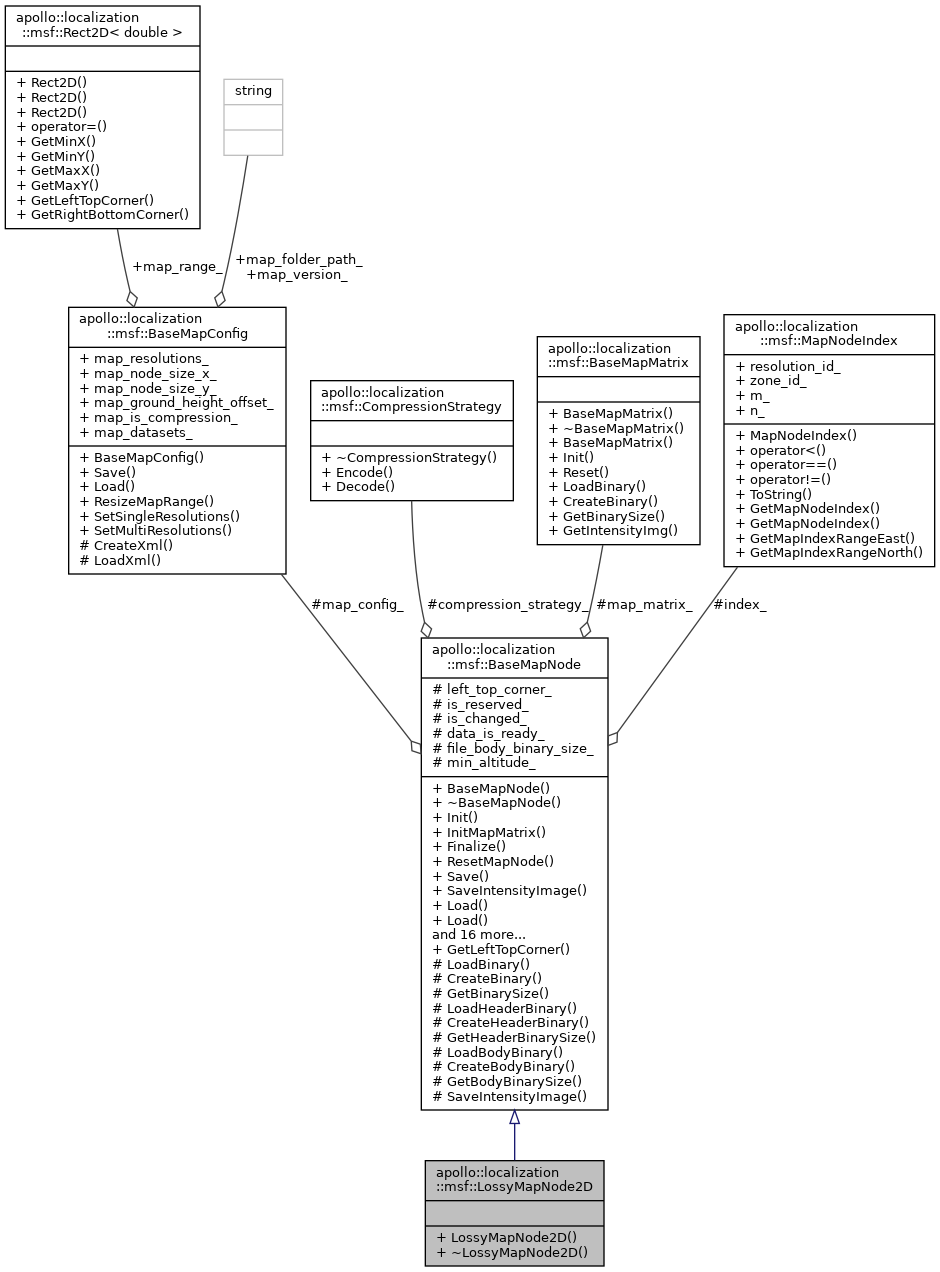
Collaboration diagram for apollo::localization::msf::LossyMapNode2D:
Public Member Functions | |
| LossyMapNode2D () | |
| ~LossyMapNode2D () | |
 Public Member Functions inherited from apollo::localization::msf::BaseMapNode Public Member Functions inherited from apollo::localization::msf::BaseMapNode | |
| BaseMapNode (BaseMapMatrix *matrix, CompressionStrategy *strategy) | |
| Construct a map node. More... | |
| virtual | ~BaseMapNode () |
| Destruct a map node. More... | |
| virtual void | Init (const BaseMapConfig *map_config, const MapNodeIndex &index, bool create_map_cells=true) |
| Initialize the map node. Call this function first before use it! More... | |
| virtual void | InitMapMatrix (const BaseMapConfig *map_config) |
| Initialize the map matrix. More... | |
| virtual void | Finalize () |
| call before deconstruction or reset. More... | |
| virtual void | ResetMapNode () |
| Reset map cells data. More... | |
| bool | Save () |
| Save the map node to the disk. More... | |
| bool | SaveIntensityImage () const |
| Save intensity image of node. More... | |
| bool | Load () |
| Load the map node from the disk. More... | |
| bool | Load (const char *filename) |
| const BaseMapMatrix & | GetMapCellMatrix () const |
| Set compression strategy. More... | |
| BaseMapMatrix & | GetMapCellMatrix () |
| const BaseMapConfig & | GetMapConfig () const |
| Get the map settings. More... | |
| void | SetMapNodeIndex (const MapNodeIndex &index) |
| Set the map node index. More... | |
| const MapNodeIndex & | GetMapNodeIndex () const |
| Get the map node index. More... | |
| void | SetIsReserved (bool is_reserved) |
| Set if the map node is reserved. More... | |
| bool | GetIsReserved () const |
| Get if the map node is reserved. More... | |
| bool | GetIsChanged () const |
| Get if the map data has changed. More... | |
| void | SetIsChanged (bool is) |
| Set if the map node data has changed. More... | |
| bool | GetIsReady () const |
| Get if the map node data is ready. More... | |
| const Eigen::Vector2d & | GetLeftTopCorner () const |
| Get the left top corner of the map node. More... | |
| void | SetLeftTopCorner (double x, double y) |
| float | GetMapResolution () const |
| Get the resolution of this map nodex. More... | |
| bool | GetCoordinate (const Eigen::Vector2d &coordinate, unsigned int *x, unsigned int *y) const |
| Given the global coordinate, get the local 2D coordinate of the map cell matrix. <return> If global coordinate (x, y) belongs to this map node. More... | |
| bool | GetCoordinate (const Eigen::Vector3d &coordinate, unsigned int *x, unsigned int *y) const |
| Eigen::Vector2d | GetCoordinate (unsigned int x, unsigned int y) const |
| Given the local 2D coordinate, return the global coordinate, eigen version. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from apollo::localization::msf::BaseMapNode | |
| static Eigen::Vector2d | GetLeftTopCorner (const BaseMapConfig &option, const MapNodeIndex &index) |
| Protected Member Functions inherited from apollo::localization::msf::BaseMapNode | |
| virtual unsigned int | LoadBinary (FILE *file) |
| Load the map cell from a binary chunk. More... | |
| virtual unsigned int | CreateBinary (FILE *file) const |
| Create the binary. Serialization of the object. More... | |
| virtual unsigned int | GetBinarySize () const |
| Get the binary size of the object. More... | |
| virtual unsigned int | LoadHeaderBinary (unsigned char *buf) |
| Load the map node header from a binary chunk. More... | |
| virtual unsigned int | CreateHeaderBinary (unsigned char *buf, unsigned int buf_size) const |
| Create the binary header. More... | |
| virtual unsigned int | GetHeaderBinarySize () const |
| Get the size of the header in bytes. More... | |
| virtual unsigned int | LoadBodyBinary (std::vector< unsigned char > *buf) |
| Load the map node body from a binary chunk. More... | |
| virtual unsigned int | CreateBodyBinary (std::vector< unsigned char > *buf) const |
| Create the binary body. More... | |
| virtual unsigned int | GetBodyBinarySize () const |
| Get the size of the body in bytes. More... | |
| bool | SaveIntensityImage (const std::string &path) const |
| Save intensity image of node. More... | |
| Protected Attributes inherited from apollo::localization::msf::BaseMapNode | |
| const BaseMapConfig * | map_config_ = nullptr |
| The map settings. More... | |
| MapNodeIndex | index_ |
| The index of this node. More... | |
| Eigen::Vector2d | left_top_corner_ |
| The left top corner of the map node in the global coordinate system. More... | |
| BaseMapMatrix * | map_matrix_ |
| The data structure of the map datas, which is a matrix. More... | |
| bool | is_reserved_ = false |
| If the node is reserved in map. More... | |
| bool | is_changed_ = false |
| Has the map node been changed. More... | |
| bool | data_is_ready_ = false |
| unsigned int | file_body_binary_size_ = 0 |
| The body binary size in file. It's useful when reading and writing files. More... | |
| CompressionStrategy * | compression_strategy_ = nullptr |
| float | min_altitude_ = 1e6 |
| The min altitude of point cloud in the node. More... | |
Constructor & Destructor Documentation
◆ LossyMapNode2D()
|
inline |
◆ ~LossyMapNode2D()
|
inline |
The documentation for this class was generated from the following file:
- modules/localization/msf/local_map/lossy_map/lossy_map_node_2d.h
