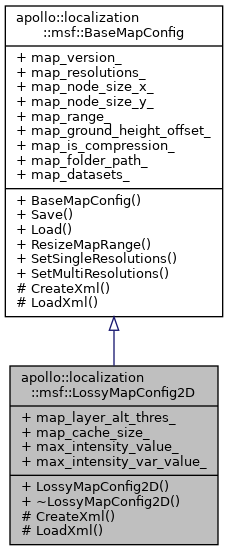
The options of the reflectance map. More...
#include <lossy_map_config_2d.h>
Public Member Functions | |
| LossyMapConfig2D (std::string map_version="lossy_map") | |
| The constructor gives the default map settings. More... | |
| ~LossyMapConfig2D () | |
 Public Member Functions inherited from apollo::localization::msf::BaseMapConfig Public Member Functions inherited from apollo::localization::msf::BaseMapConfig | |
| BaseMapConfig (std::string map_version="0.1") | |
| The constructor gives the default map settings. More... | |
| bool | Save (const std::string file_path) |
| Save the map option to a XML file. More... | |
| bool | Load (const std::string file_path) |
| Load the map option from a XML file. More... | |
| void | ResizeMapRange () |
| Resize map range by range and resolutions. More... | |
| void | SetSingleResolutions (float resolution=0.125) |
| Set single resolutions. More... | |
| void | SetMultiResolutions () |
| Set multi resolutions. More... | |
Public Attributes | |
| float | map_layer_alt_thres_ |
| The threshold to split more layers in the map node. More... | |
| unsigned int | map_cache_size_ |
| When load map nodes, the maximum number of map nodes will be kept in memory. More... | |
| float | max_intensity_value_ |
| During the visualization (for example, call the function get_image() of map node layer), the maximum intensity value in the image. More... | |
| float | max_intensity_var_value_ |
| During the visualization (for example, call the function get_image() of map node layer), the maximum intensity variance value in the image. More... | |
| Public Attributes inherited from apollo::localization::msf::BaseMapConfig | |
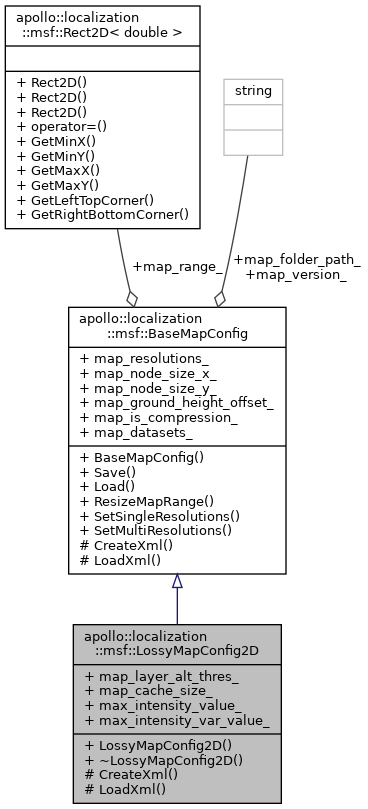
| std::string | map_version_ |
| The version of map. More... | |
| std::vector< float > | map_resolutions_ |
| The pixel resolutions in the map in meters. More... | |
| unsigned int | map_node_size_x_ |
| The map node size in pixels. More... | |
| unsigned int | map_node_size_y_ |
| The map node size in pixels. More... | |
| Rect2D< double > | map_range_ |
| The minimum and maximum UTM range in the map. More... | |
| float | map_ground_height_offset_ |
| Velodyne's height to the ground. Estimate the Velodyne's height based on the ground height. More... | |
| bool | map_is_compression_ |
| Enable the compression. More... | |
| std::string | map_folder_path_ |
| The map folder path. More... | |
| std::vector< std::string > | map_datasets_ |
| The datasets that contributed to the map. More... | |
Protected Member Functions | |
| virtual void | CreateXml (boost::property_tree::ptree *config) const |
| Create the XML structure. More... | |
| virtual void | LoadXml (const boost::property_tree::ptree &config) |
| Load the map options from a XML structure. More... | |
Detailed Description
The options of the reflectance map.
Constructor & Destructor Documentation
◆ LossyMapConfig2D()
|
explicit |
The constructor gives the default map settings.
◆ ~LossyMapConfig2D()
|
inline |
Member Function Documentation
◆ CreateXml()
|
protectedvirtual |
Create the XML structure.
Reimplemented from apollo::localization::msf::BaseMapConfig.
◆ LoadXml()
|
protectedvirtual |
Load the map options from a XML structure.
Reimplemented from apollo::localization::msf::BaseMapConfig.
Member Data Documentation
◆ map_cache_size_
| unsigned int apollo::localization::msf::LossyMapConfig2D::map_cache_size_ |
When load map nodes, the maximum number of map nodes will be kept in memory.
◆ map_layer_alt_thres_
| float apollo::localization::msf::LossyMapConfig2D::map_layer_alt_thres_ |
The threshold to split more layers in the map node.
◆ max_intensity_value_
| float apollo::localization::msf::LossyMapConfig2D::max_intensity_value_ |
During the visualization (for example, call the function get_image() of map node layer), the maximum intensity value in the image.
◆ max_intensity_var_value_
| float apollo::localization::msf::LossyMapConfig2D::max_intensity_var_value_ |
During the visualization (for example, call the function get_image() of map node layer), the maximum intensity variance value in the image.
The documentation for this class was generated from the following file:
- modules/localization/msf/local_map/lossy_map/lossy_map_config_2d.h
