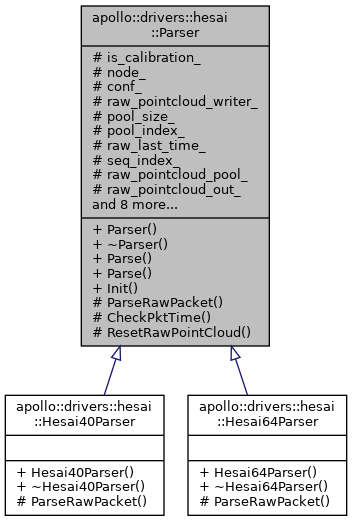
#include <parser.h>
◆ Parser()
| apollo::drivers::hesai::Parser::Parser |
( |
const std::shared_ptr<::apollo::cyber::Node > & |
node, |
|
|
const Config & |
conf |
|
) |
| |
◆ ~Parser()
| virtual apollo::drivers::hesai::Parser::~Parser |
( |
| ) |
|
|
virtual |
◆ CheckPktTime()
| void apollo::drivers::hesai::Parser::CheckPktTime |
( |
double |
time_sec | ) |
|
|
protected |
◆ Init()
| bool apollo::drivers::hesai::Parser::Init |
( |
| ) |
|
◆ Parse() [1/2]
| void apollo::drivers::hesai::Parser::Parse |
( |
const uint8_t * |
data, |
|
|
int |
size, |
|
|
bool * |
is_end |
|
) |
| |
◆ Parse() [2/2]
| bool apollo::drivers::hesai::Parser::Parse |
( |
const std::shared_ptr< HesaiScan > & |
scan | ) |
|
◆ ParseRawPacket()
| virtual void apollo::drivers::hesai::Parser::ParseRawPacket |
( |
const uint8_t * |
buf, |
|
|
const int |
len, |
|
|
bool * |
is_end |
|
) |
| |
|
protectedpure virtual |
◆ ResetRawPointCloud()
| void apollo::drivers::hesai::Parser::ResetRawPointCloud |
( |
| ) |
|
|
protected |
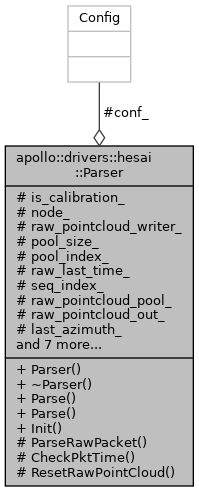
◆ conf_
| Config apollo::drivers::hesai::Parser::conf_ |
|
protected |
◆ elev_angle_map_
| double apollo::drivers::hesai::Parser::elev_angle_map_[LASER_COUNT_L64] = {0} |
|
protected |
◆ horizatal_azimuth_offset_map_
| double apollo::drivers::hesai::Parser::horizatal_azimuth_offset_map_[LASER_COUNT_L64] = {0} |
|
protected |
◆ is_calibration_
| bool apollo::drivers::hesai::Parser::is_calibration_ = false |
|
protected |
◆ last_azimuth_
| int apollo::drivers::hesai::Parser::last_azimuth_ = 0 |
|
protected |
◆ max_packets_
◆ min_packets_
◆ node_
◆ packet_nums_
| uint32_t apollo::drivers::hesai::Parser::packet_nums_ = 0 |
|
protected |
◆ pool_index_
| int apollo::drivers::hesai::Parser::pool_index_ = 0 |
|
protected |
◆ pool_size_
| int apollo::drivers::hesai::Parser::pool_size_ = 8 |
|
protected |
◆ raw_last_time_
| uint64_t apollo::drivers::hesai::Parser::raw_last_time_ = 0 |
|
protected |
◆ raw_pointcloud_out_
| std::shared_ptr<PointCloud> apollo::drivers::hesai::Parser::raw_pointcloud_out_ = nullptr |
|
protected |
◆ raw_pointcloud_pool_
| std::deque<std::shared_ptr<PointCloud> > apollo::drivers::hesai::Parser::raw_pointcloud_pool_ |
|
protected |
◆ raw_pointcloud_writer_
◆ seq_index_
| int apollo::drivers::hesai::Parser::seq_index_ = 0 |
|
protected |
◆ start_angle_
| int apollo::drivers::hesai::Parser::start_angle_ = 0 |
|
protected |
◆ tz_second_
| int apollo::drivers::hesai::Parser::tz_second_ = 0 |
|
protected |
The documentation for this class was generated from the following file:
- modules/drivers/lidar/hesai/parser/parser.h