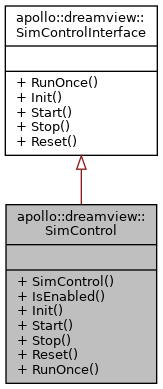
A module that simulates a 'perfect control' algorithm, which assumes an ideal world where the car can be perfectly placed wherever the planning asks it to be, with the expected speed, acceleration, etc. More...
#include <sim_control.h>

Public Member Functions | |
| SimControl (const MapService *map_service) | |
| Constructor of SimControl. More... | |
| bool | IsEnabled () const |
| void | Init (double start_velocity=0.0, double start_acceleration=0.0) override |
| setup callbacks and timer More... | |
| void | Start () override |
| Starts the timer to publish simulated localization and chassis messages. More... | |
| void | Stop () override |
| Stops the timer. More... | |
| void | Reset () override |
| Resets the internal state. More... | |
| void | RunOnce () override |
| Main logic of the simulated control algorithm. More... | |
Detailed Description
A module that simulates a 'perfect control' algorithm, which assumes an ideal world where the car can be perfectly placed wherever the planning asks it to be, with the expected speed, acceleration, etc.
Constructor & Destructor Documentation
◆ SimControl()
|
explicit |
Constructor of SimControl.
- Parameters
-
map_service the pointer of MapService.
Member Function Documentation
◆ Init()
|
overridevirtual |
setup callbacks and timer
- Parameters
-
set_start_point initialize localization.
Implements apollo::dreamview::SimControlInterface.
◆ IsEnabled()
|
inline |
◆ Reset()
|
overridevirtual |
Resets the internal state.
Implements apollo::dreamview::SimControlInterface.
◆ RunOnce()
|
overridevirtual |
Main logic of the simulated control algorithm.
Implements apollo::dreamview::SimControlInterface.
◆ Start()
|
overridevirtual |
Starts the timer to publish simulated localization and chassis messages.
Implements apollo::dreamview::SimControlInterface.
◆ Stop()
|
overridevirtual |
Stops the timer.
Implements apollo::dreamview::SimControlInterface.
The documentation for this class was generated from the following file:
- modules/dreamview/backend/sim_control/sim_control.h
