#include <receiver.h>
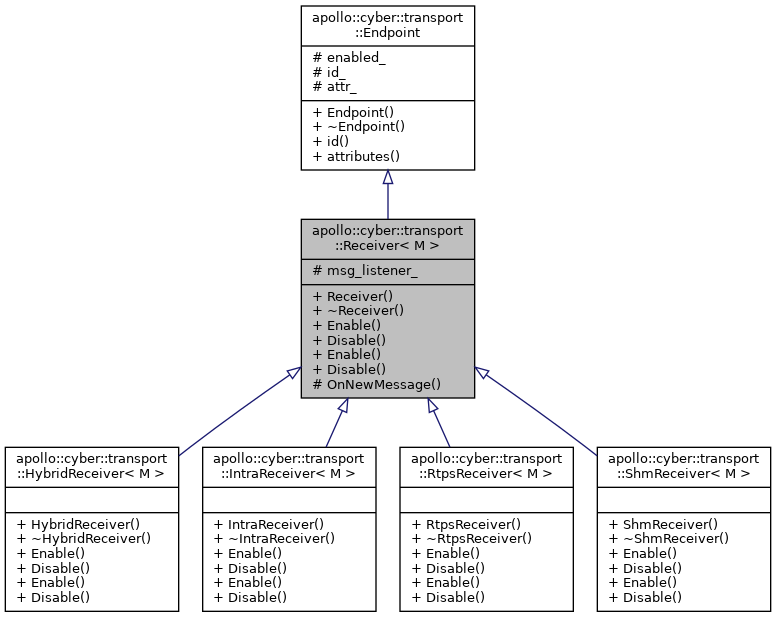
Inheritance diagram for apollo::cyber::transport::Receiver< M >:
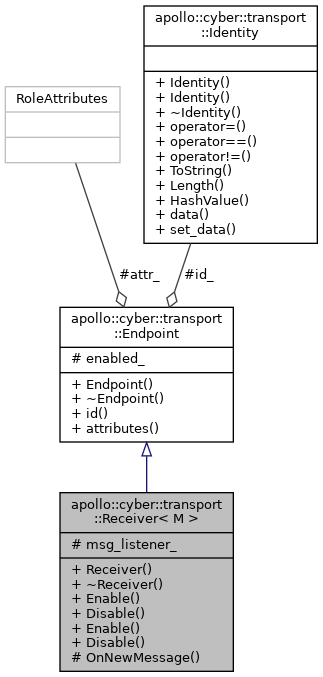
Collaboration diagram for apollo::cyber::transport::Receiver< M >:
Public Types | |
| using | MessagePtr = std::shared_ptr< M > |
| using | MessageListener = std::function< void(const MessagePtr &, const MessageInfo &, const RoleAttributes &)> |
Public Member Functions | |
| Receiver (const RoleAttributes &attr, const MessageListener &msg_listener) | |
| virtual | ~Receiver () |
| virtual void | Enable ()=0 |
| virtual void | Disable ()=0 |
| virtual void | Enable (const RoleAttributes &opposite_attr)=0 |
| virtual void | Disable (const RoleAttributes &opposite_attr)=0 |
 Public Member Functions inherited from apollo::cyber::transport::Endpoint Public Member Functions inherited from apollo::cyber::transport::Endpoint | |
| Endpoint (const RoleAttributes &attr) | |
| virtual | ~Endpoint () |
| const Identity & | id () const |
| const RoleAttributes & | attributes () const |
Protected Member Functions | |
| void | OnNewMessage (const MessagePtr &msg, const MessageInfo &msg_info) |
Protected Attributes | |
| MessageListener | msg_listener_ |
| Protected Attributes inherited from apollo::cyber::transport::Endpoint | |
| bool | enabled_ |
| Identity | id_ |
| RoleAttributes | attr_ |
Member Typedef Documentation
◆ MessageListener
template<typename M>
| using apollo::cyber::transport::Receiver< M >::MessageListener = std::function<void( const MessagePtr&, const MessageInfo&, const RoleAttributes&)> |
◆ MessagePtr
template<typename M>
| using apollo::cyber::transport::Receiver< M >::MessagePtr = std::shared_ptr<M> |
Constructor & Destructor Documentation
◆ Receiver()
template<typename M >
| apollo::cyber::transport::Receiver< M >::Receiver | ( | const RoleAttributes & | attr, |
| const MessageListener & | msg_listener | ||
| ) |
◆ ~Receiver()
template<typename M >
|
virtual |
Member Function Documentation
◆ Disable() [1/2]
template<typename M>
|
pure virtual |
◆ Disable() [2/2]
template<typename M>
|
pure virtual |
◆ Enable() [1/2]
template<typename M>
|
pure virtual |
◆ Enable() [2/2]
template<typename M>
|
pure virtual |
◆ OnNewMessage()
template<typename M >
|
protected |
Member Data Documentation
◆ msg_listener_
template<typename M>
|
protected |
The documentation for this class was generated from the following file:
- cyber/transport/receiver/receiver.h
