The utilities of velodyne. More...
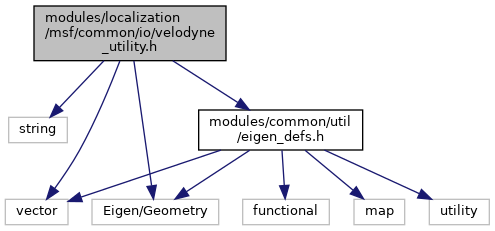
#include <string>#include <vector>#include "Eigen/Geometry"#include "modules/common/util/eigen_defs.h"
Include dependency graph for velodyne_utility.h:
Go to the source code of this file.
Classes | |
| struct | apollo::localization::msf::velodyne::VelodyneFrame |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::localization | |
| apollo::localization | |
| apollo::localization::msf | |
| apollo::localization::msf | |
| apollo::localization::msf::velodyne | |
Functions | |
| void | apollo::localization::msf::velodyne::LoadPcds (const std::string &file_path, const unsigned int frame_index, const Eigen::Affine3d &pose, VelodyneFrame *velodyne_frame, const bool is_global=false) |
| void | apollo::localization::msf::velodyne::LoadPcds (const std::string &file_path, const unsigned int frame_index, const Eigen::Affine3d &pose, ::apollo::common::EigenVector3dVec *pt3ds, std::vector< unsigned char > *intensities, bool is_global=false) |
| void | apollo::localization::msf::velodyne::LoadPcdPoses (const std::string &file_path, ::apollo::common::EigenAffine3dVec *poses, std::vector< double > *timestamps) |
| Load the PCD poses with their timestamps. More... | |
| void | apollo::localization::msf::velodyne::LoadPcdPoses (const std::string &file_path, ::apollo::common::EigenAffine3dVec *poses, std::vector< double > *timestamps, std::vector< unsigned int > *pcd_indices) |
| Load the PCD poses with their timestamps and indices. More... | |
| void | apollo::localization::msf::velodyne::LoadPosesAndStds (const std::string &file_path, ::apollo::common::EigenAffine3dVec *poses, ::apollo::common::EigenVector3dVec *stds, std::vector< double > *timestamps) |
| Load poses and stds their timestamps. More... | |
| bool | apollo::localization::msf::velodyne::LoadExtrinsic (const std::string &file_path, Eigen::Affine3d *extrinsic) |
| Save the PCD poses with their timestamps. More... | |
Detailed Description
The utilities of velodyne.
