#include <velodyne_utility.h>
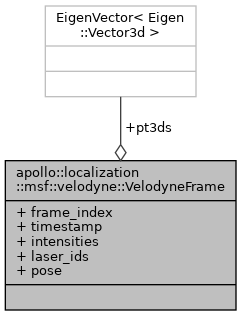
Collaboration diagram for apollo::localization::msf::velodyne::VelodyneFrame:
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW unsigned int | frame_index |
| The frame index. More... | |
| double | timestamp |
| The time stamp. More... | |
| ::apollo::common::EigenVector3dVec | pt3ds |
| The 3D point cloud in this frame. More... | |
| std::vector< unsigned char > | intensities |
| The laser reflection values in this frames. More... | |
| std::vector< unsigned char > | laser_ids |
| The laser IDs. More... | |
| Eigen::Affine3d | pose |
| The pose of the frame. More... | |
Member Data Documentation
◆ frame_index
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW unsigned int apollo::localization::msf::velodyne::VelodyneFrame::frame_index |
The frame index.
◆ intensities
| std::vector<unsigned char> apollo::localization::msf::velodyne::VelodyneFrame::intensities |
The laser reflection values in this frames.
◆ laser_ids
| std::vector<unsigned char> apollo::localization::msf::velodyne::VelodyneFrame::laser_ids |
The laser IDs.
◆ pose
| Eigen::Affine3d apollo::localization::msf::velodyne::VelodyneFrame::pose |
The pose of the frame.
◆ pt3ds
| ::apollo::common::EigenVector3dVec apollo::localization::msf::velodyne::VelodyneFrame::pt3ds |
The 3D point cloud in this frame.
◆ timestamp
| double apollo::localization::msf::velodyne::VelodyneFrame::timestamp |
The time stamp.
The documentation for this struct was generated from the following file:
- modules/localization/msf/common/io/velodyne_utility.h
