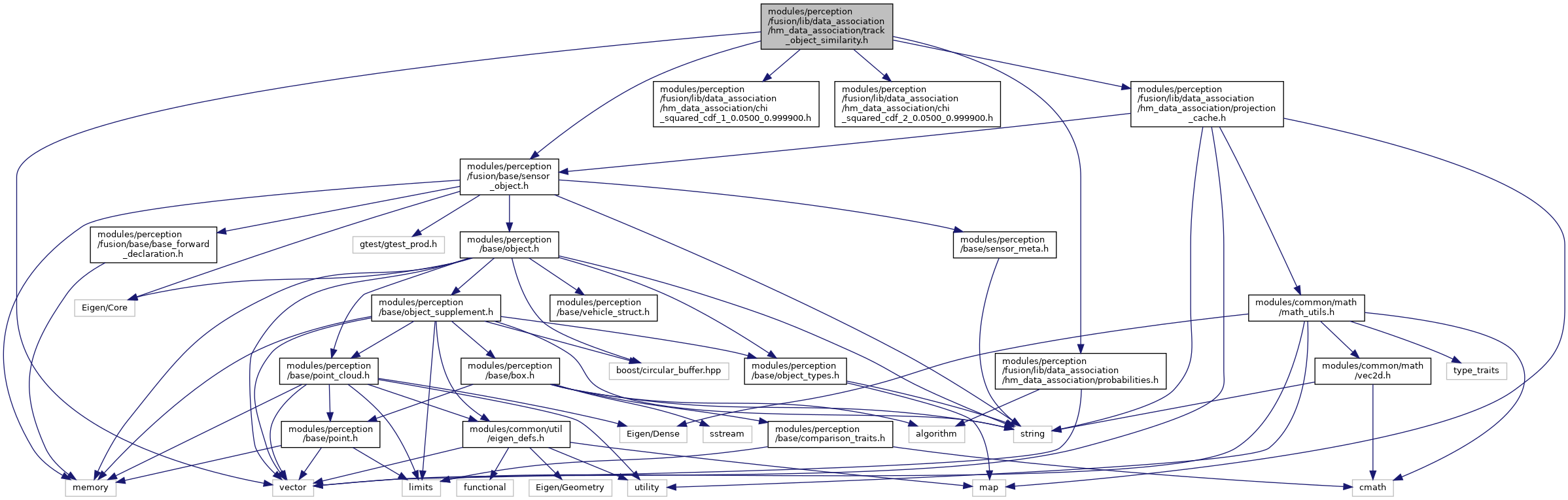
#include <vector>#include "modules/perception/fusion/base/sensor_object.h"#include "modules/perception/fusion/lib/data_association/hm_data_association/chi_squared_cdf_1_0.0500_0.999900.h"#include "modules/perception/fusion/lib/data_association/hm_data_association/chi_squared_cdf_2_0.0500_0.999900.h"#include "modules/perception/fusion/lib/data_association/hm_data_association/probabilities.h"#include "modules/perception/fusion/lib/data_association/hm_data_association/projection_cache.h"
Include dependency graph for track_object_similarity.h:
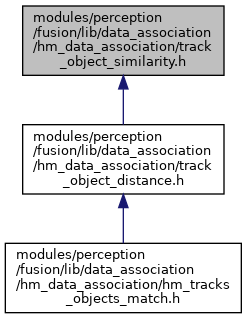
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::fusion | |
Functions | |
| double | apollo::perception::fusion::ComputePtsBoxLocationSimilarity (const ProjectionCachePtr &cache, const ProjectionCacheObject *object, const base::BBox2DF &camera_bbox) |
| double | apollo::perception::fusion::ComputePtsBoxShapeSimilarity (const ProjectionCachePtr &cache, const ProjectionCacheObject *object, const base::BBox2DF &camera_bbox) |
| double | apollo::perception::fusion::ComputePtsBoxSimilarity (const ProjectionCachePtr &cache, const ProjectionCacheObject *object, const base::BBox2DF &camera_bbox) |
| double | apollo::perception::fusion::ComputeRadarCameraXSimilarity (const double velo_ct_x, const double camera_ct_x, const double size_x, const XSimilarityParams ¶ms) |
| double | apollo::perception::fusion::ComputeRadarCameraYSimilarity (const double velo_ct_y, const double camera_ct_y, const double size_y, const YSimilarityParams ¶ms) |
| double | apollo::perception::fusion::ComputeRadarCameraHSimilarity (const SensorObjectConstPtr &radar, const SensorObjectConstPtr &camera, const double size_y, const std::vector< Eigen::Vector2d > &radar_box2d_vertices, const HSimilarityParams ¶ms) |
| double | apollo::perception::fusion::ComputeRadarCameraWSimilarity (const SensorObjectConstPtr &radar, const double width, const double size_x, const std::vector< Eigen::Vector2d > &radar_box2d_vertices, const WSimilarityParams ¶ms) |
| double | apollo::perception::fusion::ComputeRadarCameraLocSimilarity (const Eigen::Vector3d &radar_ct, const SensorObjectConstPtr &camera, const Eigen::Matrix4d &world2camera_pose, const LocSimilarityParams ¶ms) |
| double | apollo::perception::fusion::ComputeRadarCameraVelocitySimilarity (const SensorObjectConstPtr &radar, const SensorObjectConstPtr &camera) |
