#include <valet_parking_scenario.h>
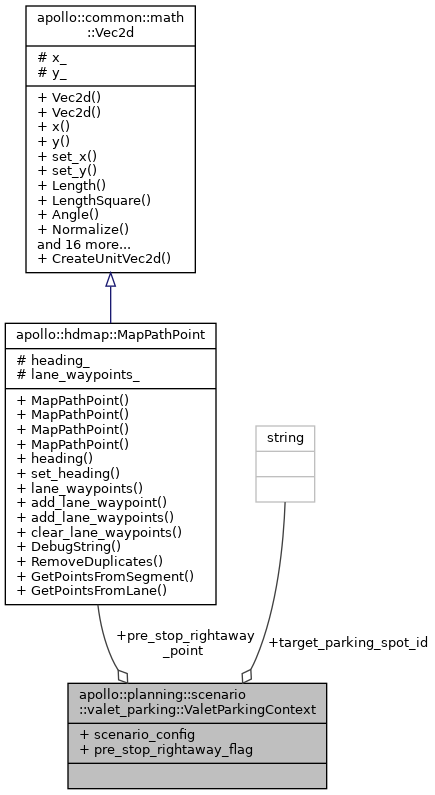
◆ pre_stop_rightaway_flag
| bool apollo::planning::scenario::valet_parking::ValetParkingContext::pre_stop_rightaway_flag = false |
◆ pre_stop_rightaway_point
| hdmap::MapPathPoint apollo::planning::scenario::valet_parking::ValetParkingContext::pre_stop_rightaway_point |
◆ scenario_config
| ScenarioValetParkingConfig apollo::planning::scenario::valet_parking::ValetParkingContext::scenario_config |
◆ target_parking_spot_id
| std::string apollo::planning::scenario::valet_parking::ValetParkingContext::target_parking_spot_id |
The documentation for this struct was generated from the following file: