#include <atomic>#include <memory>#include <string>#include <unordered_map>#include <vector>#include "cyber/common/macros.h"#include "cyber/common/util.h"#include "cyber/event/perf_event_cache.h"#include "cyber/transport/transport.h"
Include dependency graph for reader_base.h:

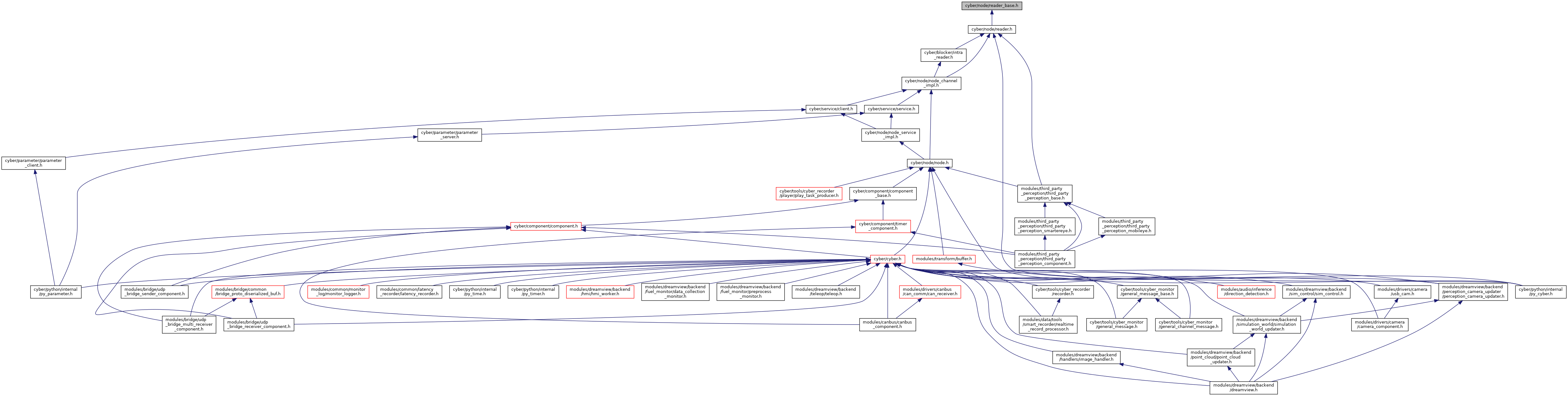
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::ReaderBase |
| Base Class for Reader Reader is identified by one apollo::cyber::proto::RoleAttribute, it contains the channel_name, channel_id that we subscribe, and host_name, process_id and node that we are located, and qos that describes our transportation quality. More... | |
| class | apollo::cyber::ReceiverManager< MessageT > |
One Channel is related to one Receiver. ReceiverManager is in charge of attaching one Receiver to its responding Channel. We pass a DataDispatche's callback func to this Receiver so when a message is received, it will be push to the ChannelBuffer, and DataVisitor will Fetch data and pass to Reader's callback func. More... | |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
