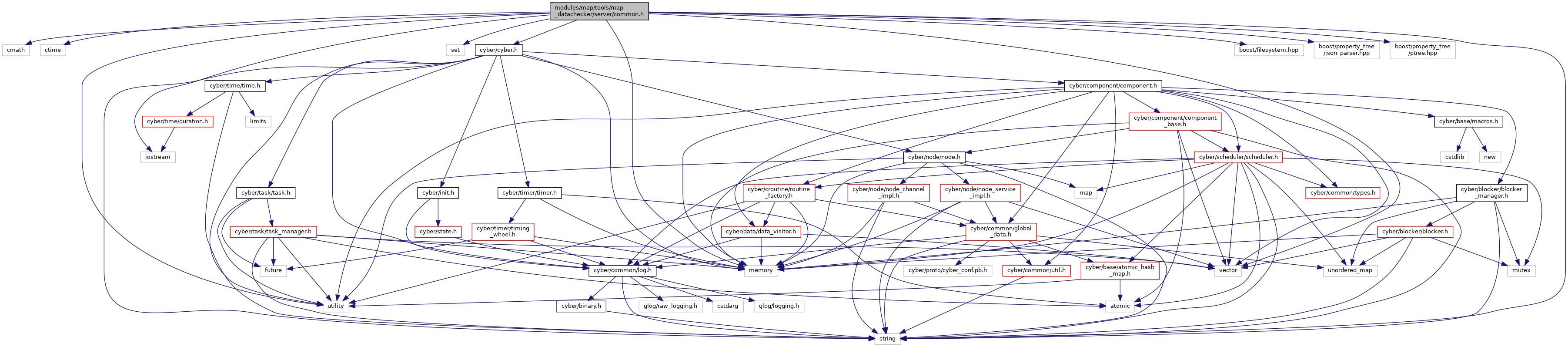
#include <cmath>#include <ctime>#include <iostream>#include <memory>#include <set>#include <string>#include <utility>#include <vector>#include <boost/filesystem.hpp>#include <boost/property_tree/json_parser.hpp>#include <boost/property_tree/ptree.hpp>#include "cyber/cyber.h"
Include dependency graph for common.h:
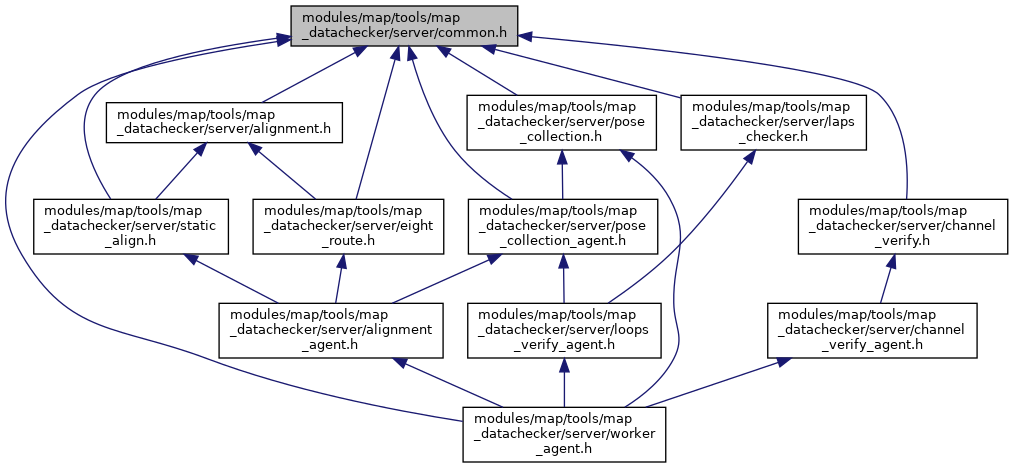
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::hdmap::FramePose |
| struct | apollo::hdmap::JsonConf |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::hdmap | |
| apollo::hdmap | |
Typedefs | |
| typedef unsigned char | apollo::hdmap::uchar |
Enumerations | |
| enum | apollo::hdmap::State { apollo::hdmap::State::IDLE, apollo::hdmap::State::RUNNING } |
Functions | |
| std::shared_ptr< JsonConf > | apollo::hdmap::ParseJson (std::string conf_path) |
| double | apollo::hdmap::GetYaw (double from_x, double from_y, double to_x, double to_y) |
| double | apollo::hdmap::UnixNow () |
Variables | |
| constexpr double | apollo::hdmap::kRADIANS_TO_DEGREES = 180.0 / M_PI |
| constexpr double | apollo::hdmap::kDEGRESS_TO_RADIANS = M_PI / 180.0 |
