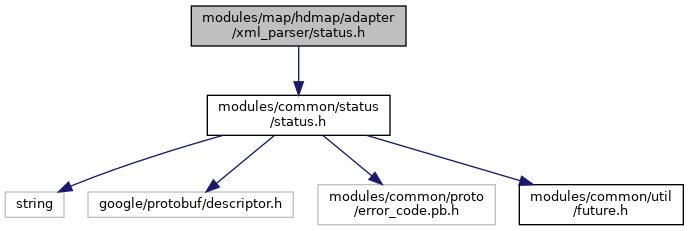
#include "modules/common/status/status.h"
Include dependency graph for status.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::hdmap | |
| apollo::hdmap | |
| apollo::hdmap::adapter | |
Macros | |
| #define | RETURN_IF_ERROR(expr) |
Macro Definition Documentation
◆ RETURN_IF_ERROR
| #define RETURN_IF_ERROR | ( | expr | ) |
Value:
do { \
const apollo::common::Status status_ = (expr); \
if (!status_.ok()) return status_; \
} while (0)
A general class to denote the return status of an API call. It can either be an OK status for success...
Definition: status.h:43
