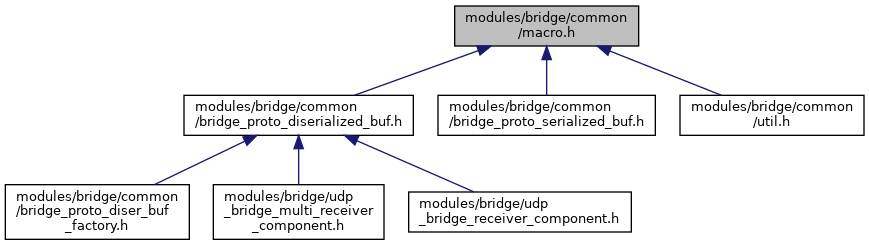
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::bridge | |
Macros | |
| #define | _1K 1024 |
| #define | FREE_ARRY(arry) |
| #define | FREE_POINTER(p) |
Variables | |
| constexpr uint32_t | apollo::bridge::FRAME_SIZE = 1024 |
Macro Definition Documentation
◆ _1K
| #define _1K 1024 |
◆ FREE_ARRY
| #define FREE_ARRY | ( | arry | ) |
Value:
if (arry) { \
delete[] arry; \
} \
arry = nullptr
◆ FREE_POINTER
| #define FREE_POINTER | ( | p | ) |
Value:
if (p) { \
delete p; \
} \
p = nullptr
