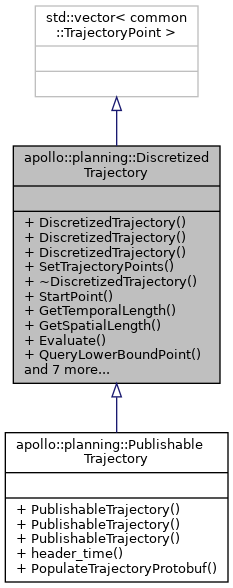
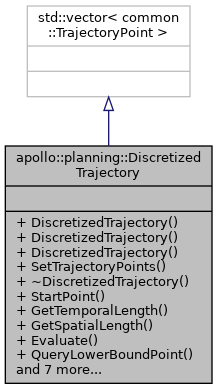
#include <discretized_trajectory.h>
◆ DiscretizedTrajectory() [1/3]
| apollo::planning::DiscretizedTrajectory::DiscretizedTrajectory |
( |
| ) |
|
|
default |
◆ DiscretizedTrajectory() [2/3]
| apollo::planning::DiscretizedTrajectory::DiscretizedTrajectory |
( |
const ADCTrajectory & |
trajectory | ) |
|
|
explicit |
◆ DiscretizedTrajectory() [3/3]
| apollo::planning::DiscretizedTrajectory::DiscretizedTrajectory |
( |
const std::vector< common::TrajectoryPoint > & |
trajectory_points | ) |
|
|
explicit |
◆ ~DiscretizedTrajectory()
| virtual apollo::planning::DiscretizedTrajectory::~DiscretizedTrajectory |
( |
| ) |
|
|
virtualdefault |
◆ AppendTrajectoryPoint()
| virtual void apollo::planning::DiscretizedTrajectory::AppendTrajectoryPoint |
( |
const common::TrajectoryPoint & |
trajectory_point | ) |
|
|
virtual |
◆ Clear()
| void apollo::planning::DiscretizedTrajectory::Clear |
( |
| ) |
|
|
inlinevirtual |
◆ Evaluate()
| virtual common::TrajectoryPoint apollo::planning::DiscretizedTrajectory::Evaluate |
( |
const double |
relative_time | ) |
const |
|
virtual |
◆ GetSpatialLength()
| virtual double apollo::planning::DiscretizedTrajectory::GetSpatialLength |
( |
| ) |
const |
|
virtual |
◆ GetTemporalLength()
| virtual double apollo::planning::DiscretizedTrajectory::GetTemporalLength |
( |
| ) |
const |
|
virtual |
◆ NumOfPoints()
| size_t apollo::planning::DiscretizedTrajectory::NumOfPoints |
( |
| ) |
const |
|
inline |
◆ PrependTrajectoryPoints()
| void apollo::planning::DiscretizedTrajectory::PrependTrajectoryPoints |
( |
const std::vector< common::TrajectoryPoint > & |
trajectory_points | ) |
|
|
inline |
◆ QueryLowerBoundPoint()
| virtual size_t apollo::planning::DiscretizedTrajectory::QueryLowerBoundPoint |
( |
const double |
relative_time, |
|
|
const double |
epsilon = 1.0e-5 |
|
) |
| const |
|
virtual |
◆ QueryNearestPoint()
| virtual size_t apollo::planning::DiscretizedTrajectory::QueryNearestPoint |
( |
const common::math::Vec2d & |
position | ) |
const |
|
virtual |
◆ QueryNearestPointWithBuffer()
| size_t apollo::planning::DiscretizedTrajectory::QueryNearestPointWithBuffer |
( |
const common::math::Vec2d & |
position, |
|
|
const double |
buffer |
|
) |
| const |
◆ SetTrajectoryPoints()
| void apollo::planning::DiscretizedTrajectory::SetTrajectoryPoints |
( |
const std::vector< common::TrajectoryPoint > & |
trajectory_points | ) |
|
◆ StartPoint()
| virtual common::TrajectoryPoint apollo::planning::DiscretizedTrajectory::StartPoint |
( |
| ) |
const |
|
virtual |
◆ TrajectoryPointAt()
| const common::TrajectoryPoint& apollo::planning::DiscretizedTrajectory::TrajectoryPointAt |
( |
const size_t |
index | ) |
const |
The documentation for this class was generated from the following file: