#include <camera_perception_viz_message.h>
◆ CameraPerceptionVizMessage() [1/2]
| apollo::perception::onboard::CameraPerceptionVizMessage::CameraPerceptionVizMessage |
( |
| ) |
|
|
inline |
◆ ~CameraPerceptionVizMessage()
| apollo::perception::onboard::CameraPerceptionVizMessage::~CameraPerceptionVizMessage |
( |
| ) |
|
|
default |
◆ CameraPerceptionVizMessage() [2/2]
| apollo::perception::onboard::CameraPerceptionVizMessage::CameraPerceptionVizMessage |
( |
const std::string & |
camera_name, |
|
|
const double |
msg_timestamp, |
|
|
const Eigen::Matrix4d & |
pose_camera_to_world, |
|
|
const std::shared_ptr< base::Blob< uint8_t >> & |
image_blob, |
|
|
const std::vector< base::ObjectPtr > & |
camera_objects, |
|
|
const std::vector< base::LaneLine > & |
lane_objects, |
|
|
const apollo::common::ErrorCode & |
error_code |
|
) |
| |
◆ GetTypeName()
| std::string apollo::perception::onboard::CameraPerceptionVizMessage::GetTypeName |
( |
| ) |
const |
|
inline |
◆ New()
◆ operator=()
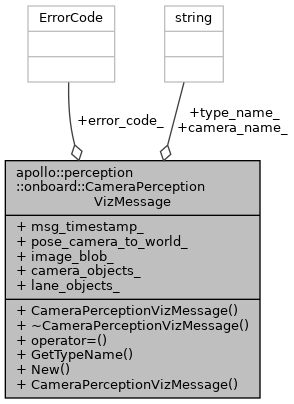
◆ camera_name_
| std::string apollo::perception::onboard::CameraPerceptionVizMessage::camera_name_ |
◆ camera_objects_
| std::vector<base::ObjectConstPtr> apollo::perception::onboard::CameraPerceptionVizMessage::camera_objects_ |
◆ error_code_
| apollo::common::ErrorCode apollo::perception::onboard::CameraPerceptionVizMessage::error_code_ = apollo::common::ErrorCode::OK |
◆ image_blob_
| std::shared_ptr<base::Blob<uint8_t> > apollo::perception::onboard::CameraPerceptionVizMessage::image_blob_ |
◆ lane_objects_
| std::vector<base::LaneLine> apollo::perception::onboard::CameraPerceptionVizMessage::lane_objects_ |
◆ msg_timestamp_
| double apollo::perception::onboard::CameraPerceptionVizMessage::msg_timestamp_ = 0.0 |
◆ pose_camera_to_world_
| Eigen::Matrix4d apollo::perception::onboard::CameraPerceptionVizMessage::pose_camera_to_world_ |
◆ type_name_
| std::string apollo::perception::onboard::CameraPerceptionVizMessage::type_name_ |
The documentation for this class was generated from the following file: