#include <mlf_track_data.h>
|
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | MlfTrackData ()=default |
| |
| | ~MlfTrackData ()=default |
| |
| void | Reset () override |
| |
| void | Reset (TrackedObjectPtr obj, int track_id) |
| |
| void | PushTrackedObjectToTrack (TrackedObjectPtr obj) |
| |
| void | PushTrackedObjectToCache (TrackedObjectPtr obj) |
| |
| bool | ToObject (const Eigen::Vector3d &local_to_global_offset, double timestamp, base::ObjectPtr object) const |
| |
| void | RemoveStaleHistory (double timestamp) |
| |
| void | PredictState (double timestamp) const |
| |
| void | GetAndCleanCachedObjectsInTimeInterval (std::vector< TrackedObjectPtr > *objects) |
| |
| std::pair< double, TrackedObjectPtr > | GetLatestSensorObject (const std::string &sensor_name) |
| |
| std::pair< double, TrackedObjectConstPtr > | GetLatestSensorObject (const std::string &sensor_name) const |
| |
| | TrackData () |
| |
| | TrackData (TrackedObjectPtr obj, int track_id) |
| |
| virtual | ~TrackData () |
| |
| std::pair< double, TrackedObjectPtr > | GetLatestObject () |
| |
| std::pair< double, TrackedObjectConstPtr > | GetLatestObject () const |
| |
| std::pair< double, TrackedObjectPtr > | GetOldestObject () |
| |
| std::pair< double, TrackedObjectConstPtr > | GetOldestObject () const |
| |
| std::pair< double, TrackedObjectPtr > | GetHistoryObject (int idx) |
| |
| std::pair< double, TrackedObjectConstPtr > | GetHistoryObject (int idx) const |
| |
| virtual void | Reset (TrackedObjectPtr obj, double time, int track_id) |
| |
| virtual void | PushTrackedObjectToTrack (TrackedObjectPtr obj, double time) |
| |
◆ TimedObjects
◆ MlfTrackData()
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW apollo::perception::lidar::MlfTrackData::MlfTrackData |
( |
| ) |
|
|
default |
◆ ~MlfTrackData()
| apollo::perception::lidar::MlfTrackData::~MlfTrackData |
( |
| ) |
|
|
default |
◆ GetAndCleanCachedObjectsInTimeInterval()
| void apollo::perception::lidar::MlfTrackData::GetAndCleanCachedObjectsInTimeInterval |
( |
std::vector< TrackedObjectPtr > * |
objects | ) |
|
◆ GetLatestSensorObject() [1/2]
| std::pair<double, TrackedObjectPtr> apollo::perception::lidar::MlfTrackData::GetLatestSensorObject |
( |
const std::string & |
sensor_name | ) |
|
|
inline |
◆ GetLatestSensorObject() [2/2]
| std::pair<double, TrackedObjectConstPtr> apollo::perception::lidar::MlfTrackData::GetLatestSensorObject |
( |
const std::string & |
sensor_name | ) |
const |
|
inline |
◆ PredictState()
| void apollo::perception::lidar::MlfTrackData::PredictState |
( |
double |
timestamp | ) |
const |
◆ PushTrackedObjectToCache()
| void apollo::perception::lidar::MlfTrackData::PushTrackedObjectToCache |
( |
TrackedObjectPtr |
obj | ) |
|
◆ PushTrackedObjectToTrack()
| void apollo::perception::lidar::MlfTrackData::PushTrackedObjectToTrack |
( |
TrackedObjectPtr |
obj | ) |
|
◆ RemoveStaleHistory()
| void apollo::perception::lidar::MlfTrackData::RemoveStaleHistory |
( |
double |
timestamp | ) |
|
◆ Reset() [1/2]
| void apollo::perception::lidar::MlfTrackData::Reset |
( |
| ) |
|
|
overridevirtual |
◆ Reset() [2/2]
| void apollo::perception::lidar::MlfTrackData::Reset |
( |
TrackedObjectPtr |
obj, |
|
|
int |
track_id |
|
) |
| |
◆ ToObject()
| bool apollo::perception::lidar::MlfTrackData::ToObject |
( |
const Eigen::Vector3d & |
local_to_global_offset, |
|
|
double |
timestamp, |
|
|
base::ObjectPtr |
object |
|
) |
| const |
◆ cached_objects_
| TimedObjects apollo::perception::lidar::MlfTrackData::cached_objects_ |
◆ consecutive_invisible_time_
| double apollo::perception::lidar::MlfTrackData::consecutive_invisible_time_ = 0.0 |
◆ duration_
| double apollo::perception::lidar::MlfTrackData::duration_ = 0.0 |
◆ first_tracked_time_
| double apollo::perception::lidar::MlfTrackData::first_tracked_time_ = 0.0 |
◆ is_current_state_predicted_
| bool apollo::perception::lidar::MlfTrackData::is_current_state_predicted_ = true |
◆ kMaxHistoryTime
| const double apollo::perception::lidar::MlfTrackData::kMaxHistoryTime |
|
static |
◆ latest_cached_time_
| double apollo::perception::lidar::MlfTrackData::latest_cached_time_ = 0.0 |
◆ latest_visible_time_
| double apollo::perception::lidar::MlfTrackData::latest_visible_time_ = 0.0 |
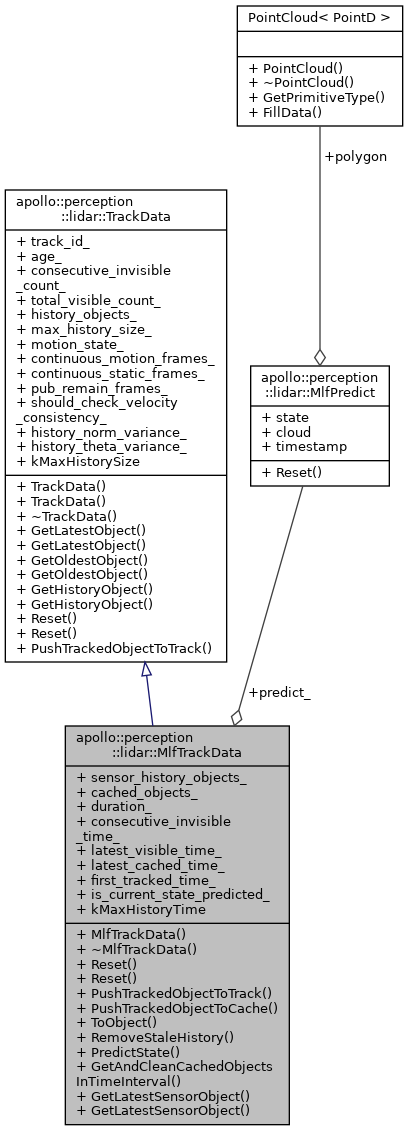
◆ predict_
| MlfPredict apollo::perception::lidar::MlfTrackData::predict_ |
|
mutable |
◆ sensor_history_objects_
| std::map<std::string, TimedObjects> apollo::perception::lidar::MlfTrackData::sensor_history_objects_ |
The documentation for this class was generated from the following file:
 Public Member Functions inherited from apollo::perception::lidar::TrackData
Public Member Functions inherited from apollo::perception::lidar::TrackData