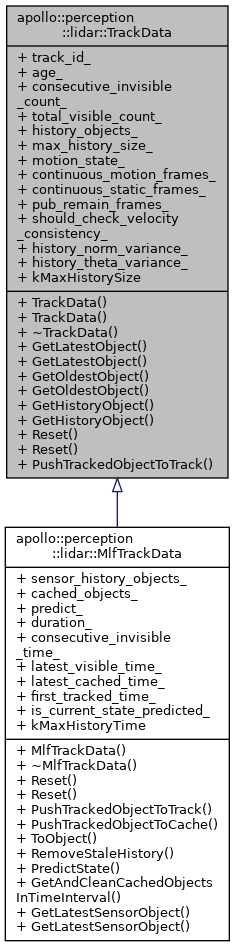
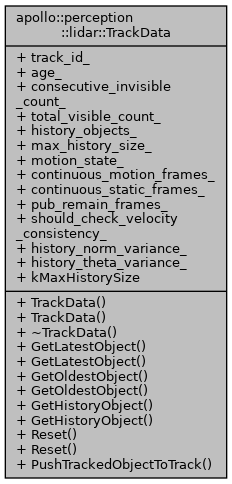
#include <track_data.h>
|
| | TrackData () |
| |
| | TrackData (TrackedObjectPtr obj, int track_id) |
| |
| virtual | ~TrackData () |
| |
| std::pair< double, TrackedObjectPtr > | GetLatestObject () |
| |
| std::pair< double, TrackedObjectConstPtr > | GetLatestObject () const |
| |
| std::pair< double, TrackedObjectPtr > | GetOldestObject () |
| |
| std::pair< double, TrackedObjectConstPtr > | GetOldestObject () const |
| |
| std::pair< double, TrackedObjectPtr > | GetHistoryObject (int idx) |
| |
| std::pair< double, TrackedObjectConstPtr > | GetHistoryObject (int idx) const |
| |
| virtual void | Reset () |
| |
| virtual void | Reset (TrackedObjectPtr obj, double time, int track_id) |
| |
| virtual void | PushTrackedObjectToTrack (TrackedObjectPtr obj, double time) |
| |
◆ TrackData() [1/2]
| apollo::perception::lidar::TrackData::TrackData |
( |
| ) |
|
◆ TrackData() [2/2]
| apollo::perception::lidar::TrackData::TrackData |
( |
TrackedObjectPtr |
obj, |
|
|
int |
track_id |
|
) |
| |
◆ ~TrackData()
| virtual apollo::perception::lidar::TrackData::~TrackData |
( |
| ) |
|
|
virtual |
◆ GetHistoryObject() [1/2]
| std::pair<double, TrackedObjectPtr> apollo::perception::lidar::TrackData::GetHistoryObject |
( |
int |
idx | ) |
|
◆ GetHistoryObject() [2/2]
| std::pair<double, TrackedObjectConstPtr> apollo::perception::lidar::TrackData::GetHistoryObject |
( |
int |
idx | ) |
const |
◆ GetLatestObject() [1/2]
| std::pair<double, TrackedObjectPtr> apollo::perception::lidar::TrackData::GetLatestObject |
( |
| ) |
|
|
inline |
◆ GetLatestObject() [2/2]
◆ GetOldestObject() [1/2]
| std::pair<double, TrackedObjectPtr> apollo::perception::lidar::TrackData::GetOldestObject |
( |
| ) |
|
|
inline |
◆ GetOldestObject() [2/2]
◆ PushTrackedObjectToTrack()
| virtual void apollo::perception::lidar::TrackData::PushTrackedObjectToTrack |
( |
TrackedObjectPtr |
obj, |
|
|
double |
time |
|
) |
| |
|
virtual |
◆ Reset() [1/2]
| virtual void apollo::perception::lidar::TrackData::Reset |
( |
| ) |
|
|
virtual |
◆ Reset() [2/2]
| virtual void apollo::perception::lidar::TrackData::Reset |
( |
TrackedObjectPtr |
obj, |
|
|
double |
time, |
|
|
int |
track_id |
|
) |
| |
|
virtual |
◆ age_
| int apollo::perception::lidar::TrackData::age_ = 0 |
◆ consecutive_invisible_count_
| int apollo::perception::lidar::TrackData::consecutive_invisible_count_ = 0 |
◆ continuous_motion_frames_
| size_t apollo::perception::lidar::TrackData::continuous_motion_frames_ = 0 |
◆ continuous_static_frames_
| size_t apollo::perception::lidar::TrackData::continuous_static_frames_ = 0 |
◆ history_norm_variance_
| std::deque<double> apollo::perception::lidar::TrackData::history_norm_variance_ |
◆ history_objects_
| std::map<double, TrackedObjectPtr> apollo::perception::lidar::TrackData::history_objects_ |
◆ history_theta_variance_
| std::deque<double> apollo::perception::lidar::TrackData::history_theta_variance_ |
◆ kMaxHistorySize
| const int apollo::perception::lidar::TrackData::kMaxHistorySize |
|
static |
◆ max_history_size_
| int apollo::perception::lidar::TrackData::max_history_size_ = 40 |
◆ motion_state_
◆ pub_remain_frames_
| size_t apollo::perception::lidar::TrackData::pub_remain_frames_ = 0 |
◆ should_check_velocity_consistency_
| bool apollo::perception::lidar::TrackData::should_check_velocity_consistency_ = true |
◆ total_visible_count_
| int apollo::perception::lidar::TrackData::total_visible_count_ = 0 |
◆ track_id_
| int apollo::perception::lidar::TrackData::track_id_ = -1 |
The documentation for this class was generated from the following file: